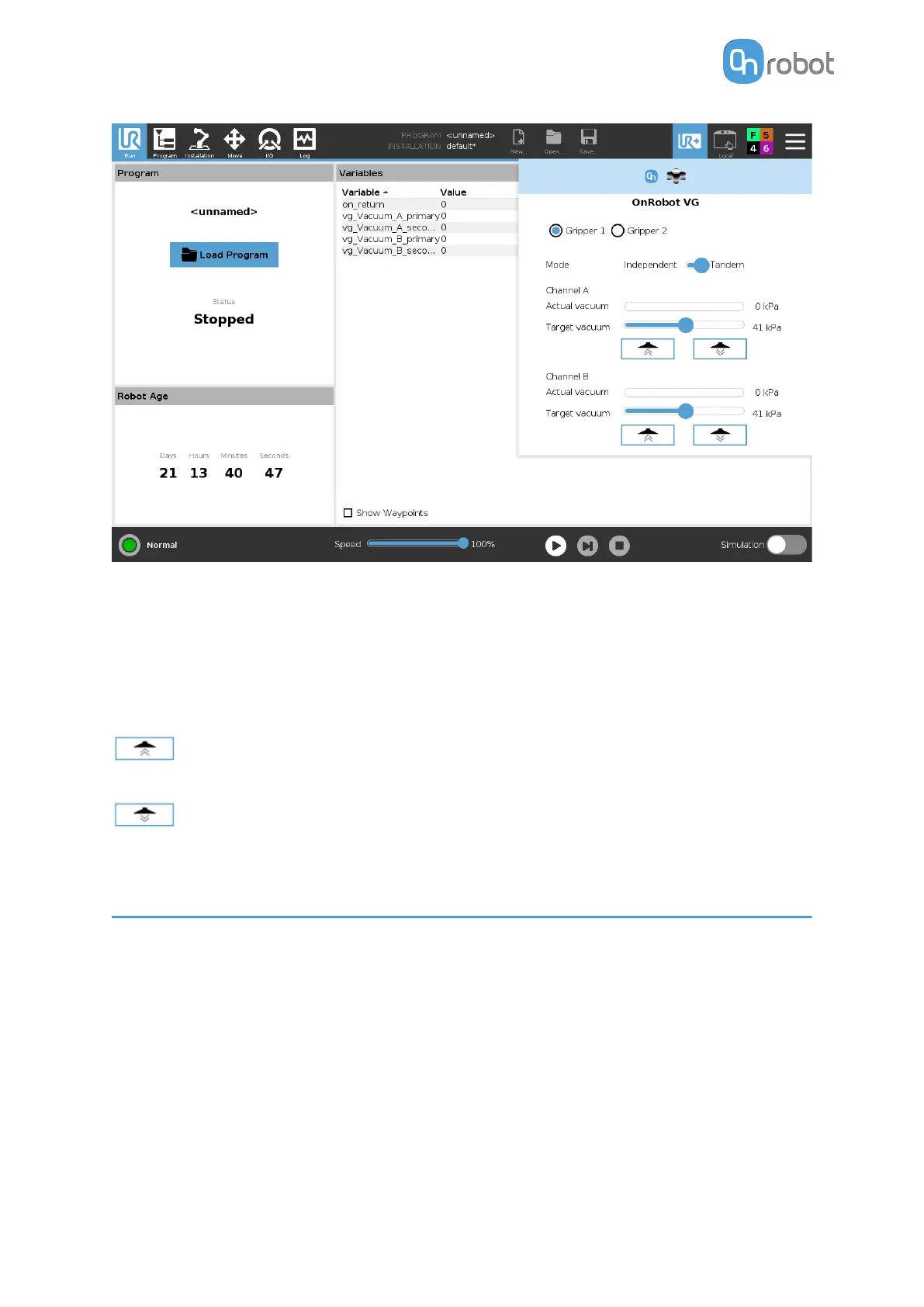
Gripper 1 and Gripper 2: In case of using 2 VG grippers you can select which one performs
the action.
Mode: Select Independent (actuate a channel individually) or Tandem (actuate both channels
together).
Actual vacuum: shows the current vacuum in each channel.
Target vacuum:
defines target vacuum in each channel.
(Grip button): when pressed, the pump will start to generate vacuum at the selected
level on the selected channel(s).
(Release button): when pressed, the test-grip will terminate and release any
workpieces that may be held by the selected channel.
6.3. URScript Commands
URScript commands can be used alongside other scripts.
6.3.1. 3FG15
When the OnRobot URCap is enabled, there will be several 3FG script functions available:
tfg_grip(diameter, force, external_grip= True, stop_if_no_force =true,
tool_index=0, blocking=True)
diameter: The diameter that the gripper will open to. [mm]
force: The force that the gripper will try to reach. [N]
external_grip: If true, the internal gripper diameter to do an external grip will be used. If
false, the external gripper diameter to do an internal grip will be used.
OPERATION
125