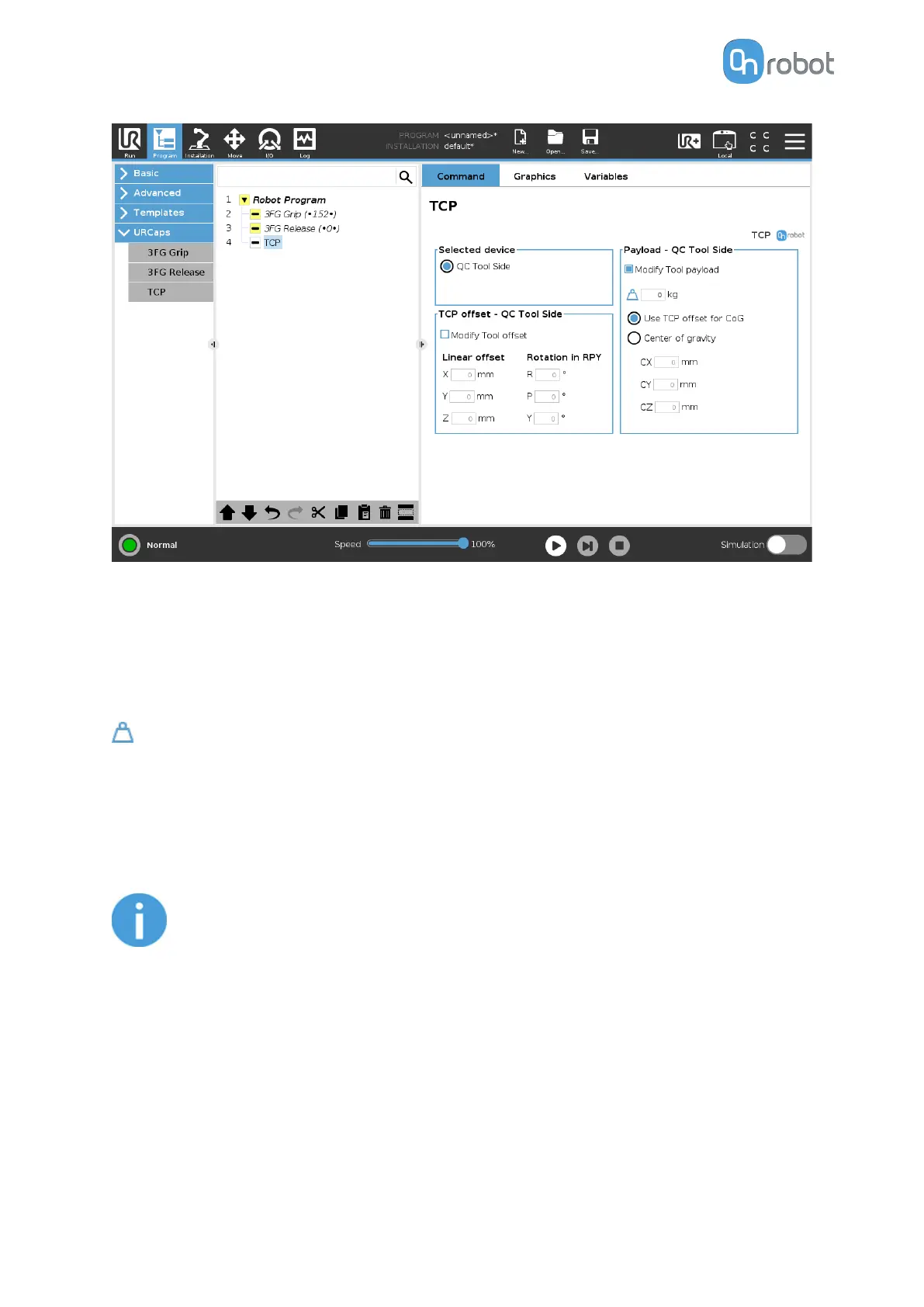
TCP oset
Set the Linear oset (X,Y,Z) and the Rotation in RPY (Roll-Pitch-Yaw) values to adjust the
OnRobot device dependent calculated TCP.
Payload
Modify Tool payload: If enabled the UR's payload will be overwritten.
enter the workpiece mass that is attached to the device. The device own mass is added
automatically.
Use TCP
oset for CoG: set the center of gravity of the workpiece at the active TCP position.
Center of gravity CX, CY, CZ: set the location of the center of gravity of the workpiece.
6.1.3. RG2-FT
NOTE:
At program start the force/torque finger sensors are automatically zeroed so
no need to place an F/T Zero at the beginning of the program. Please make
sure that the fingers are not in contact with any obstacle when the program is
started. Otherwise the sensors will not be properly zeroed.
RG Grip
When the RG Grip command is executed, the gripper will try to reach the
specified target (W
(Width) and F (Force)) and, if selected, Depth compensation ON and/or Automatic centering
ON. The dierent functions are explained below.
OPERATION
82