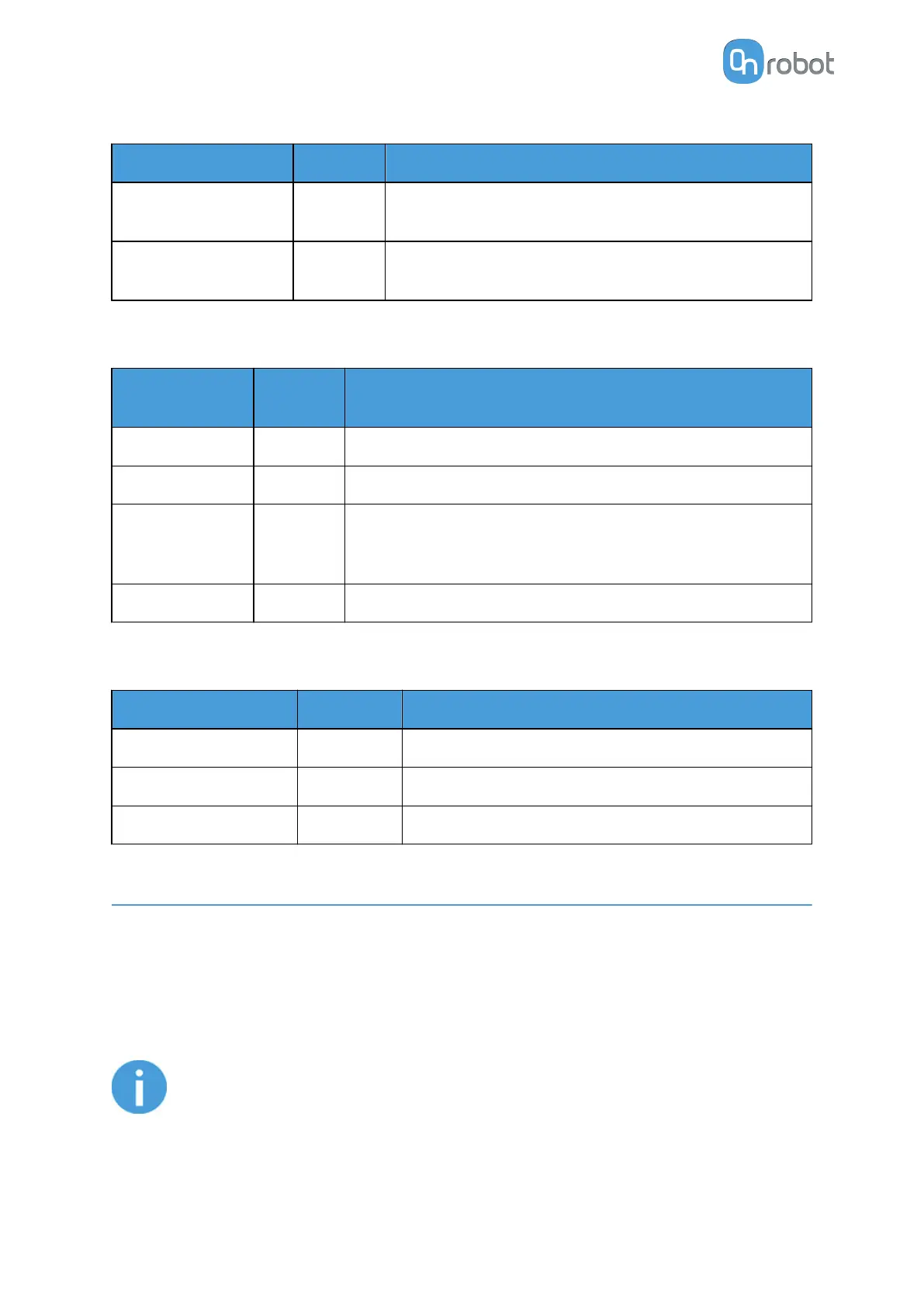
Feedback Variable Unit Description
sd_Target_torque Nm Last Tighten command Target torque after it has been
executed
sd_Torque_gradient Nm/rad Achieved torque gradient after a Tighten command
has been executed
6.6.6. SG
Feedback
Variable
Unit Description
on_return The return value for the OnRobot commands
sg_Busy True/false Whether the gripper is active or not
sg_Depth [mm] Distance the robot (due to depth compensation) has moved
towards the z axes having as reference the gripper at 0 mm
width
sg_Width [mm] Width inside of the Gripper
6.6.7. VG10 / VGC10
Feedback Variable
Unit Description
on_return 0 The return value for the OnRobot commands
vg_Vacuum_A %Vacuum Returns the %Vacuum achieved on channel A
vg_Vacuum_B %Vacuum Returns the %Vacuum achieved on channel B
6.7. Application Examples
6.7.1. Screwdriver
Below a simple Screw in application is explained:
Lines 2 - 7: the robot moves to the screw feeder and wait for a digital input signal from the
screw feeder saying that the screw is ready to be picked up.
NOTE:
The screwdriver's bit should be at least 50 mm away from the picking point
until the screw is waiting in place. Otherwise, the magnetic force of the Screw-
bit system will attract the screw sidewise and it might cause a misalignment
between the screw and the bit.
OPERATION
140