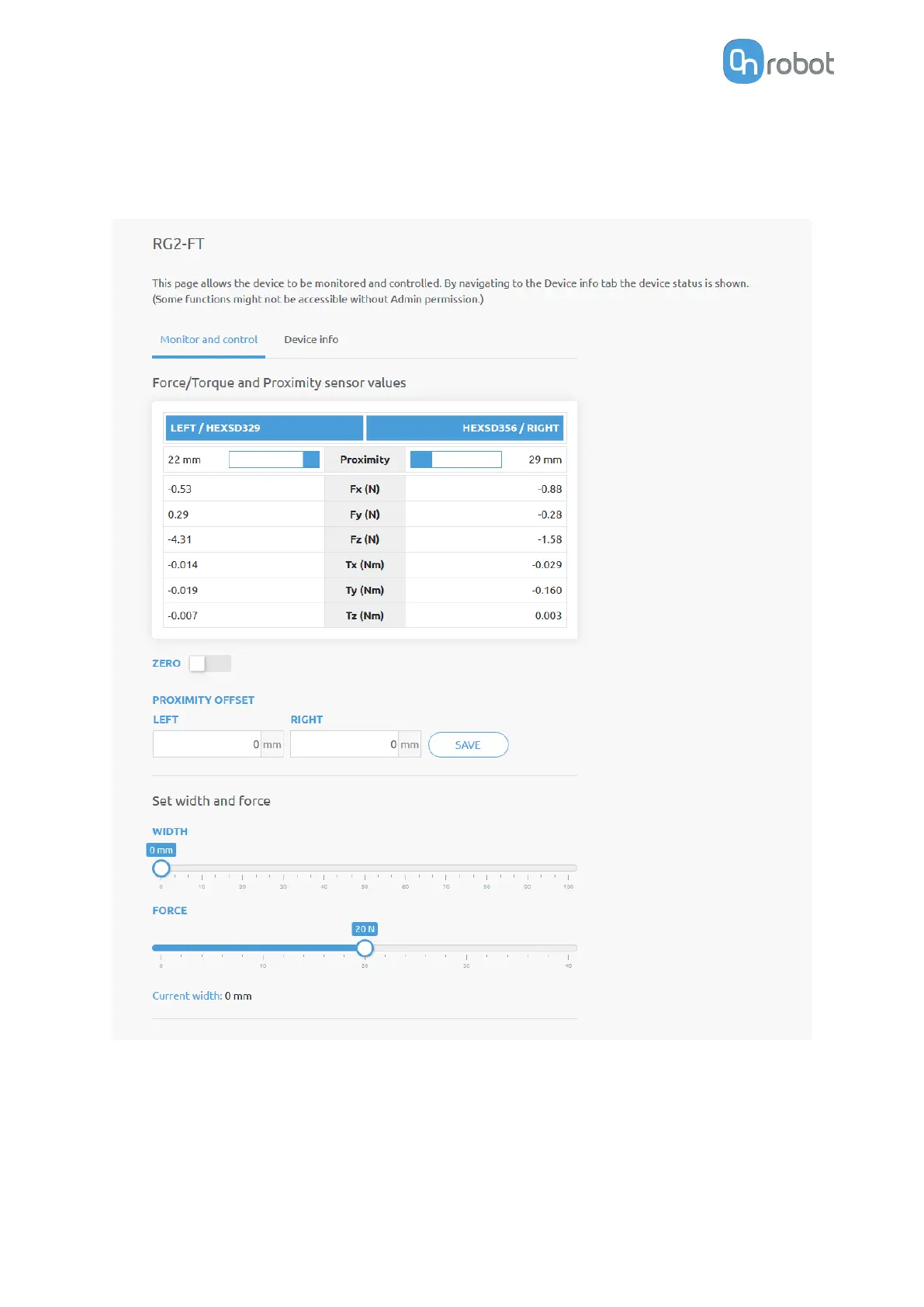
The gripper can be controlled by adjusting the Force and Width value. First set the required
gripping force and then adjust the width slider that will immediately control the gripper.
7.1.3.4. RG2-FT
The force and torque values (Fx,Fy,Fz and Tx,Ty,Tz) are shown in N/Nm along with the
Proximity sensor values (optical distance sensor built in the fingertip) are show in mm for the
left and right fingertip sensor.
The Zero toggle switch can be used to zero the force and torque reading.
ADDITIONAL SOFTWARE OPTIONS
150