Gripping Force
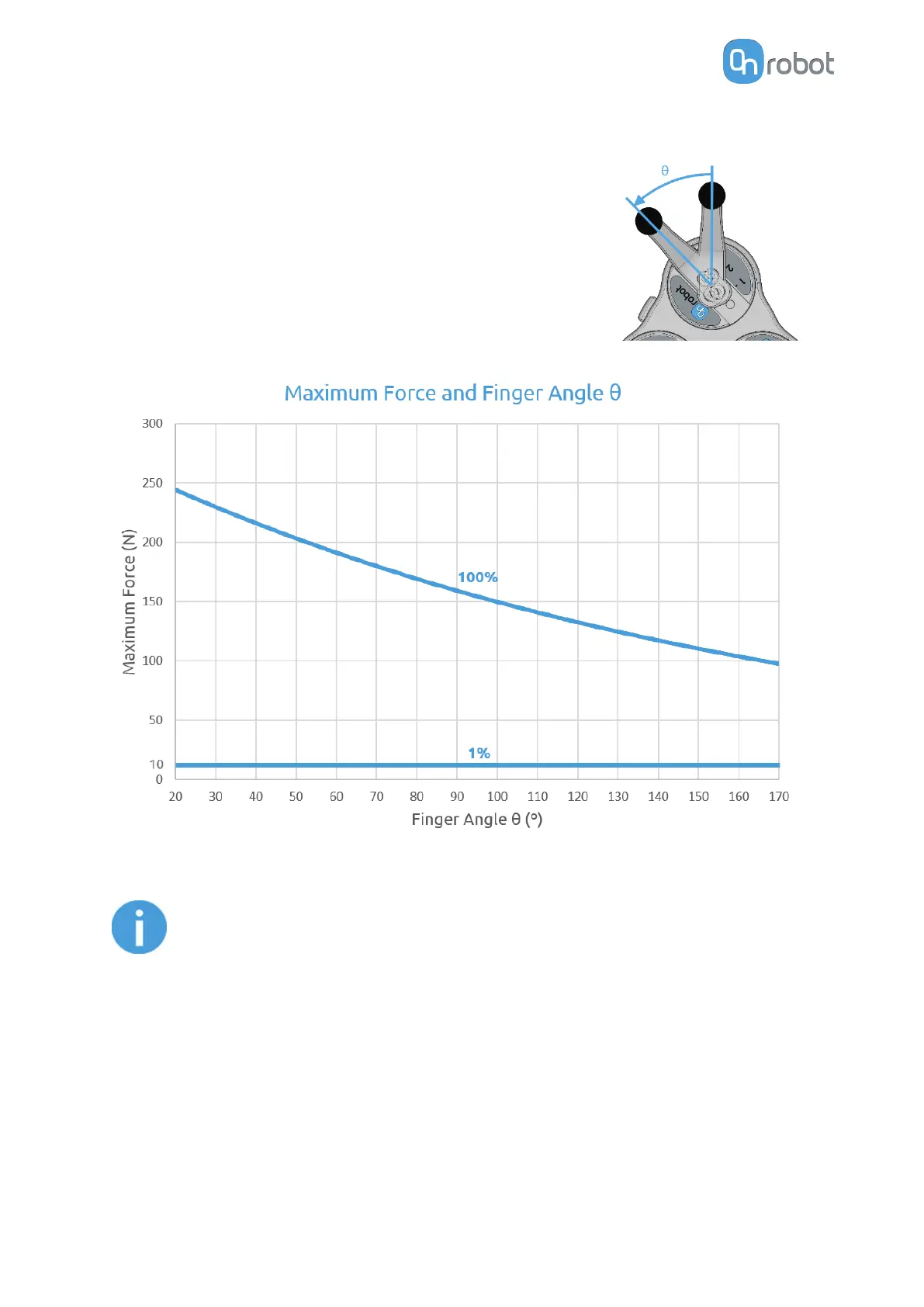
The total gripping force highly depends on the finger angle θ. For
both internal and external grip, the lower the finger angle, the
higher the force that will be applied as shown in the graph below.
Although the fingers can move from 0 to 180, the angle range of
an external grip is 30º-165º and for an internal grip 20º-160º
Graph plotted using measurements with 1 A current, silicone
fingertips and a metal workpiece.
NOTE:
The total force applied depends on the finger angle, the input current (limited
in some robots' tool flange connection) and the friction coecient between the
materials of the fingertips and the workpiece.
Finger Movement and Force
The gripping action has two phases:
Phase 1: For a safety reason, the fingers will start moving with a low force (maximum ~50 N) to
avoid damaging anything that could get clamped between the gripper fingers and the
workpiece.
HARDWARE SPECIFICATION
169