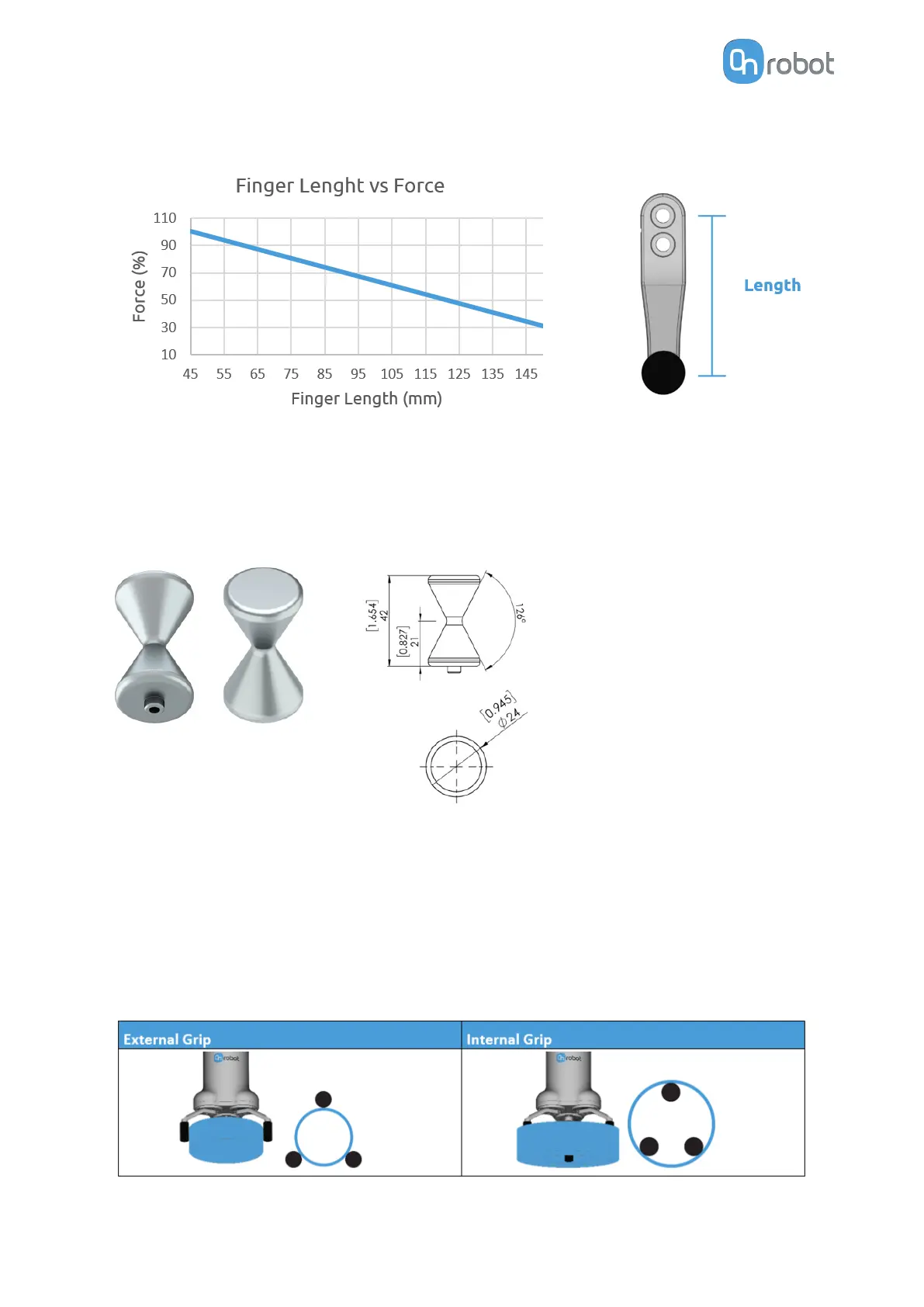
In the graph below, how the % of maximum achievable force decreases as the finger length
increases when customized fingertips are used.
X-shape fingertips
These fingertips improve the gripper's ability to pick and place round workpieces with collar
like features. By combining the force
fit and the form fit gripping approaches, the fingertips
increase the stability and payload of the workpiece to be gripped.
When these fingertips are used, set the fingertip diameter to 16 mm in the robot program.
These
fingertips are optional accessories and need to be purchased separately. To purchase
these fingertips, please contact the distributor.
•
3FG X-Shape
fingertips PN 105877
Types of Grips
In the document the internal and external grip terms are used. These grips are related to how
the workpiece is gripped.
HARDWARE SPECIFICATION
168