If two OnRobot devices are used, select OnRobot_Dual_1 or OnRobot_Dual_2 accordingly.
If not the UR's Move command but the OnRobot F/T Move command is used (for HEX-E/H QC
or RG2-FT only):
•
Use the OnRobot TCP command just before the F/T Move to set the Active TCP to the
right value
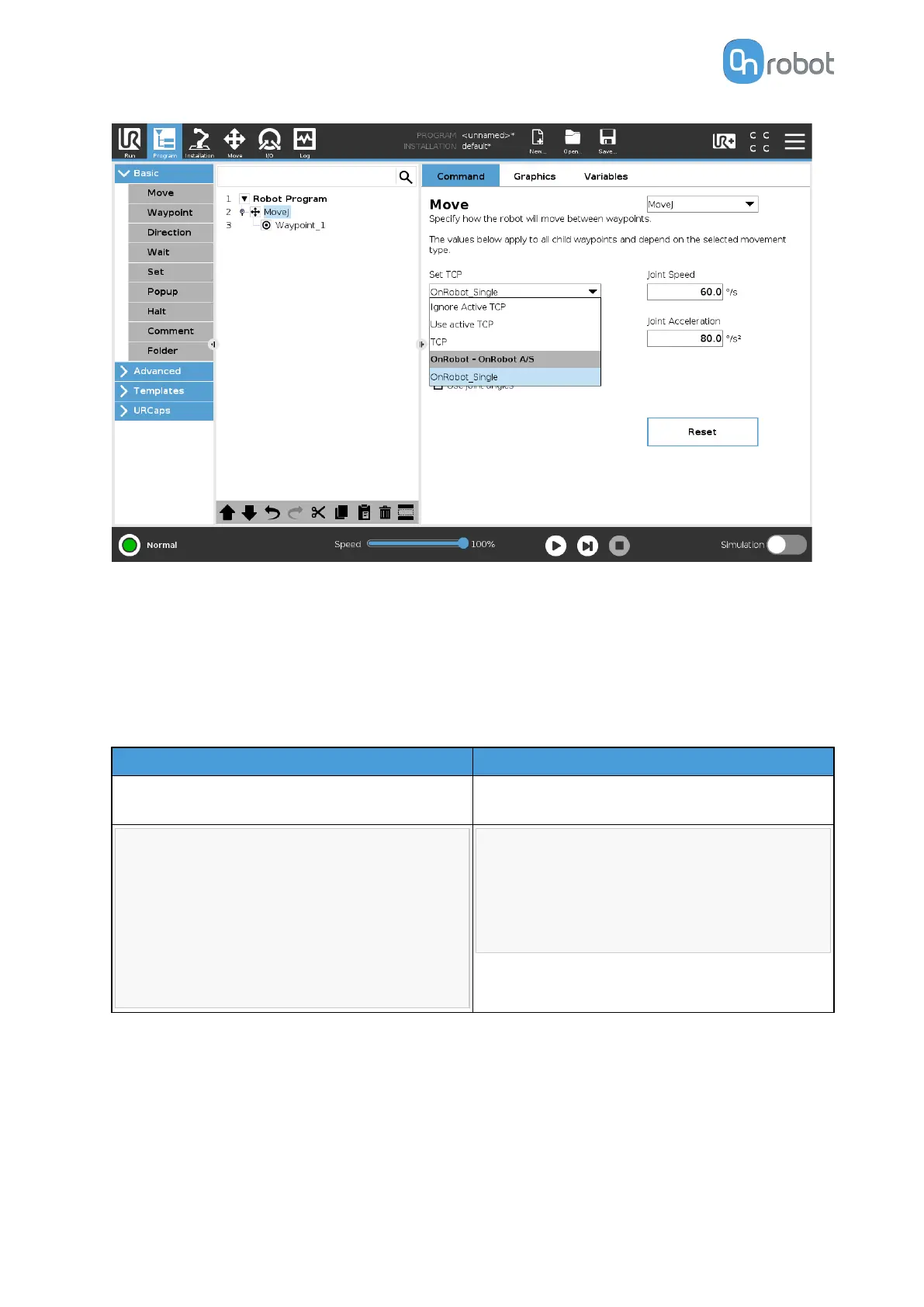
As summary here is a code example:
Single
Dual
Not mandatory to set OnRobot TCP as Default
TCP
Not mandatory to set OnRobot TCP as Default
TCP
Robot program
MoveJ (Set TCP = OnRobot_Single)
#Alternatively
TCP
F/T Move
Robot program
MoveJ (Set TCP = OnRobot_Dual_1)
MoveJ (Set TCP = OnRobot_Dual_2)
OPERATION
133