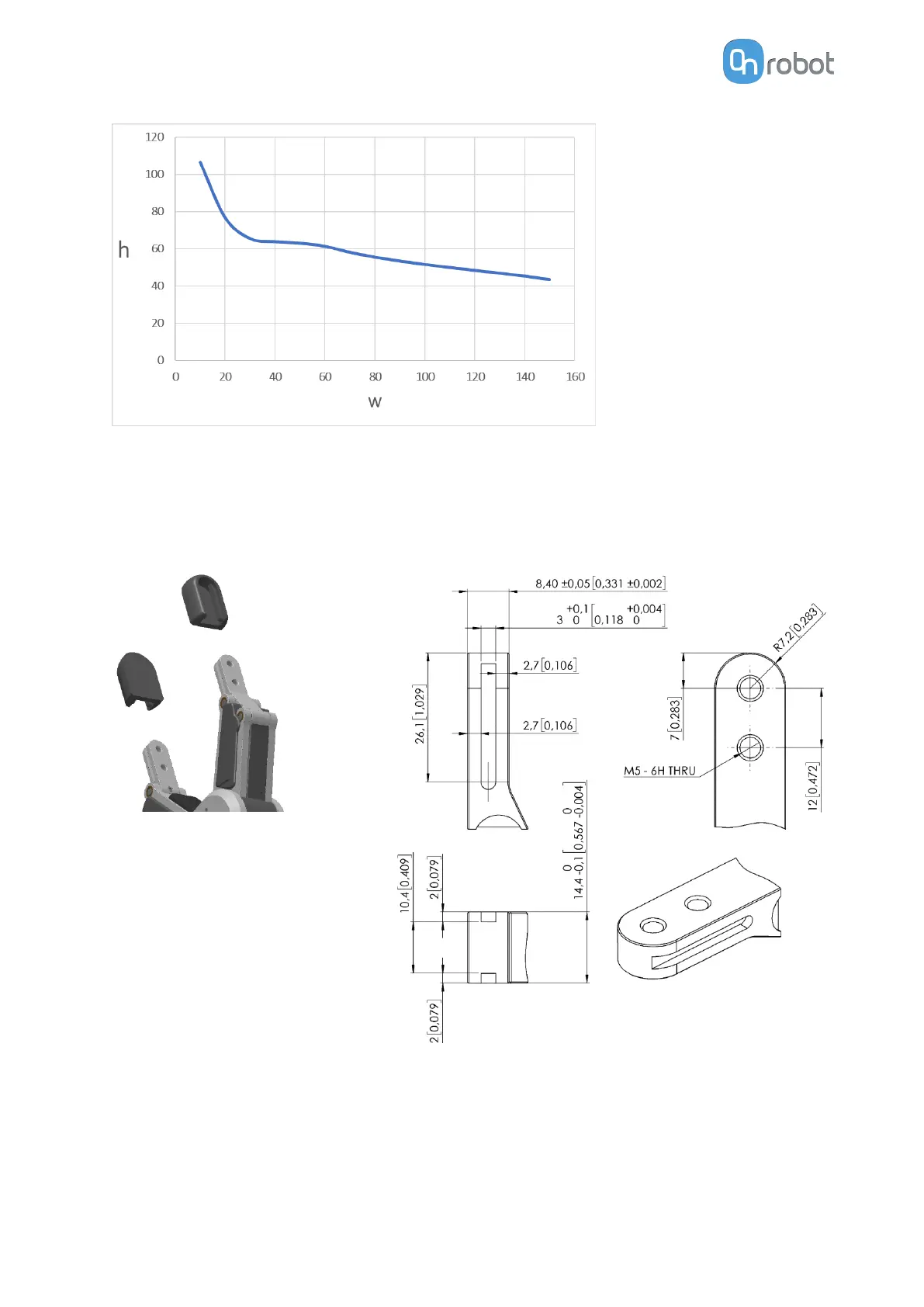
Fingertips
The standard fingertips can be used for many dierent workpieces. If custom fingertips are
required, they can be made to
fit the Gripper’s fingers according to the dimensions (mm)
shown below:
X-Shaped fingertips
These fingertips improve the gripper's ability to pick and place cylindrical workpieces. By
combining the force fit and the form fit gripping approaches, the fingertips increase the
stability and payload of the workpiece to be gripped.
HARDWARE SPECIFICATION
187