Soft Silicone
Some SG tool designs has a soft silicone part in the top of the gripper. These tools are better
suited for handling fragile workpieces and/or workpieces with a high variance in size,
compared to the hard silicone tools. This is due to the more “forgiving” nature of the soft part.
The user may experience a reduced payload compared to the hard silicone tools.
To handle a workpiece properly, the user must know some parameters that are
defined by the
general conditions of the workpiece and its presentation in the application. This helps to
define which tool to choose and the actual grip width on it.
A general overview of such parameters is listed below:
•
Shape
•
Dimension
•
Weight
•
Roughness
•
Fragility
•
Orientation of pick/placement
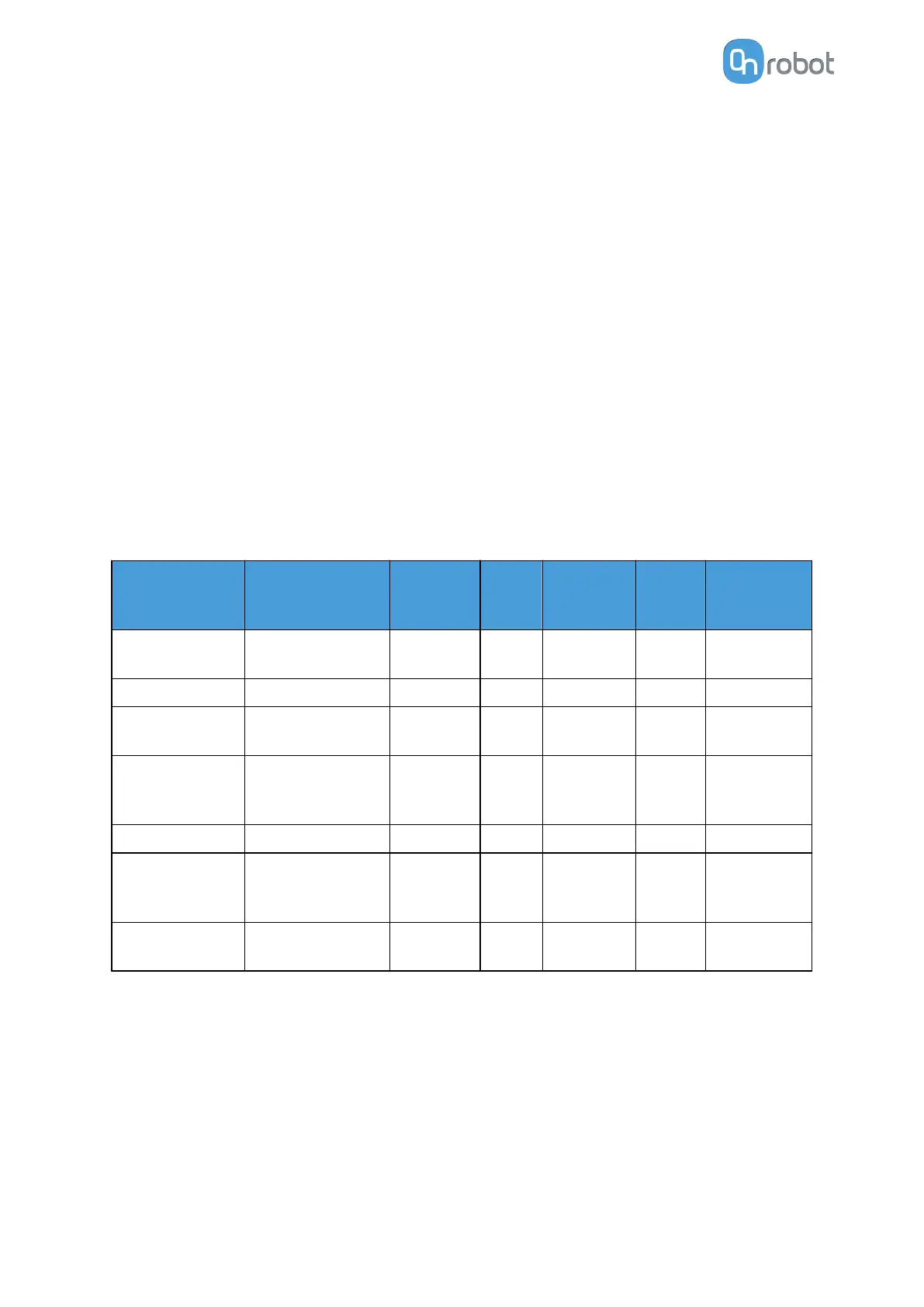
For a better understanding of how to handle workpieces with
dierent parameters, tests were
conducted with a SG-a-H tool, see table below.
Example of
material
Workpiece Dimension Weight Roughness Shape Actual
gripping
width
Smooth wood
(Sanded)
Round stick 27mm 32g 5 Cylinder 20mm
Polished metal Aluminum cube 35x25mm 512g 1 Square 15mm
Rough metal Aluminum
cylinder
60mm 490g 8 Cylinder 55mm
Plastic PET Bottle
POM-C
POM-C
65mm
50mm
50mm
431g
221g
1410g
1
2
2
Cylinder
Cylinder
Cylinder
50mm
42mm
15mm
Glass Drinking glass 68mm 238g 1 Cylinder 50mm
Organic material Tomato
Mushroom
Grape
54mm
40mm
20mm
92g
8g
7g
2
10
10
Round
Round
Oval
53mm
39mm
16mm
Carbonfiber Carbonfiber
cylinder
38mm 48g 7 Cylinder 29mm
Notice objects with high weight needs higher force asserted upon them, therefor the small
gripping width.
HARDWARE SPECIFICATION
204