Payload
The lifting capacity of the VG grippers depends primarily on the following parameters:
•
Vacuum cups
•
Vacuum
•
Air
flow
Vacuum Cups
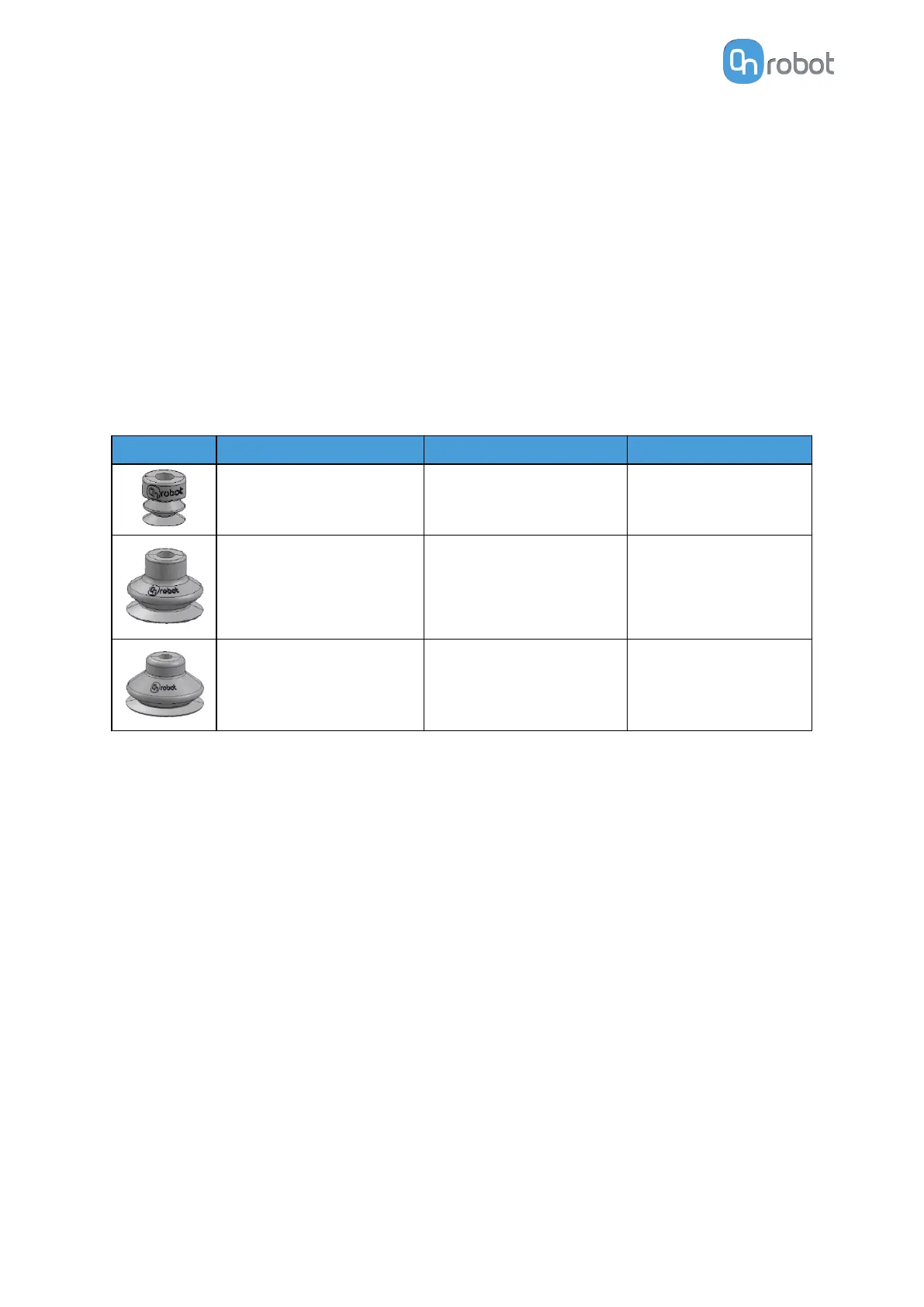
Choosing the right vacuum cups for your application is essential. The VG grippers come with
common 15, 30 and 40 mm silicone vacuum cups (see table below) which are good for hard
and flat surfaces, but not good for uneven surfaces and it might leave microscopic traces of
silicone on the workpiece which can cause issues with some types of painting processes
afterwards.
Image
External Diameter [mm] Internal Diameter [mm] Gripping Area [mm2]
15 6 29
30 16 200
40 24 450
For non-porous materials, the OnRobot suction cups are highly recommended. Some of the
most common non-porous materials are listed below:
•
Composites
•
Glass
•
High density cardboard
•
High density paper
•
Metals
•
Plastic
•
Porous materials with a sealed surface
•
Varnished wood
In an ideal case, working with non-porous material workpieces where there are no air
flow
going through the workpiece, the table below shows the number of cups and the cup size
needed depending on the payload (workpiece mass) and the vacuum used.
Number of Cups needed for non-porous materials depending on payload and vacuum :
HARDWARE SPECIFICATION
222