174
Intera 3.2
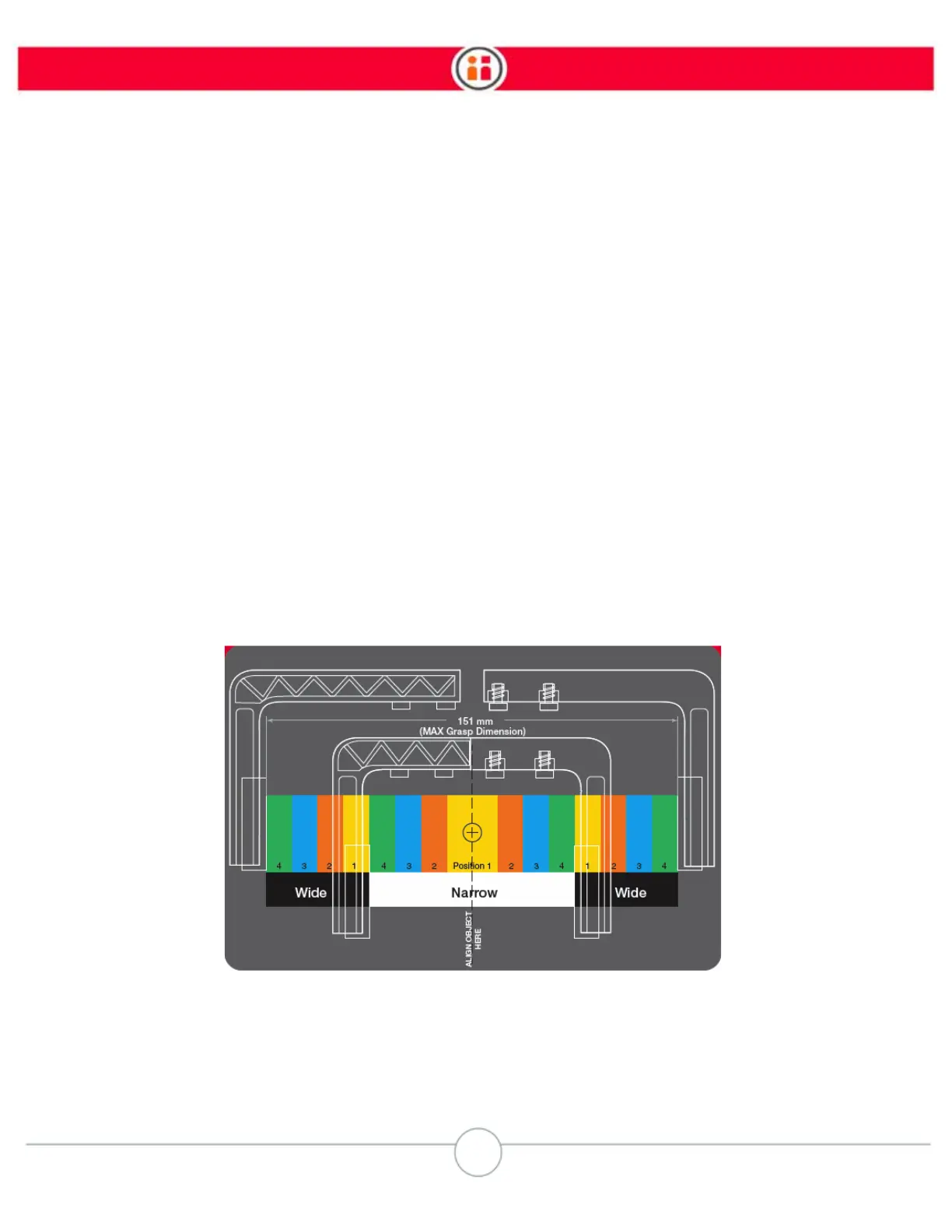
The illustration below (not to scale) shows the
Finger Selection and Position Guide
included in the
inside
cover of the
Parallel Gripper Kit
. Key concepts to remember when choosing fingers and
position are:
1. Place the object in the center of the chart in the same orientation as the robot will
grasp it.
2. Use the object’s edges to determine the best fingers and position.
• Consider finger tip thickness, as it will alter grasp range.
• There should be at least 1 cm of clearance between the part and the finger
tips when the gripper is open (outside grasp).
• If object edges are on the lines of a zone, choose the next position, or next
size fingers.
3. Try different finger tips based on the shape and size of the object.
4. Consider adding a limiter to give additional stability.
Also, Consider cutting and adhering the silicon material included in the gripper kit
to the flat finger tips to provide a better grip when grasping objects with the flat
finger tips.