20
Intera 3.2
Getting to Know Baxter
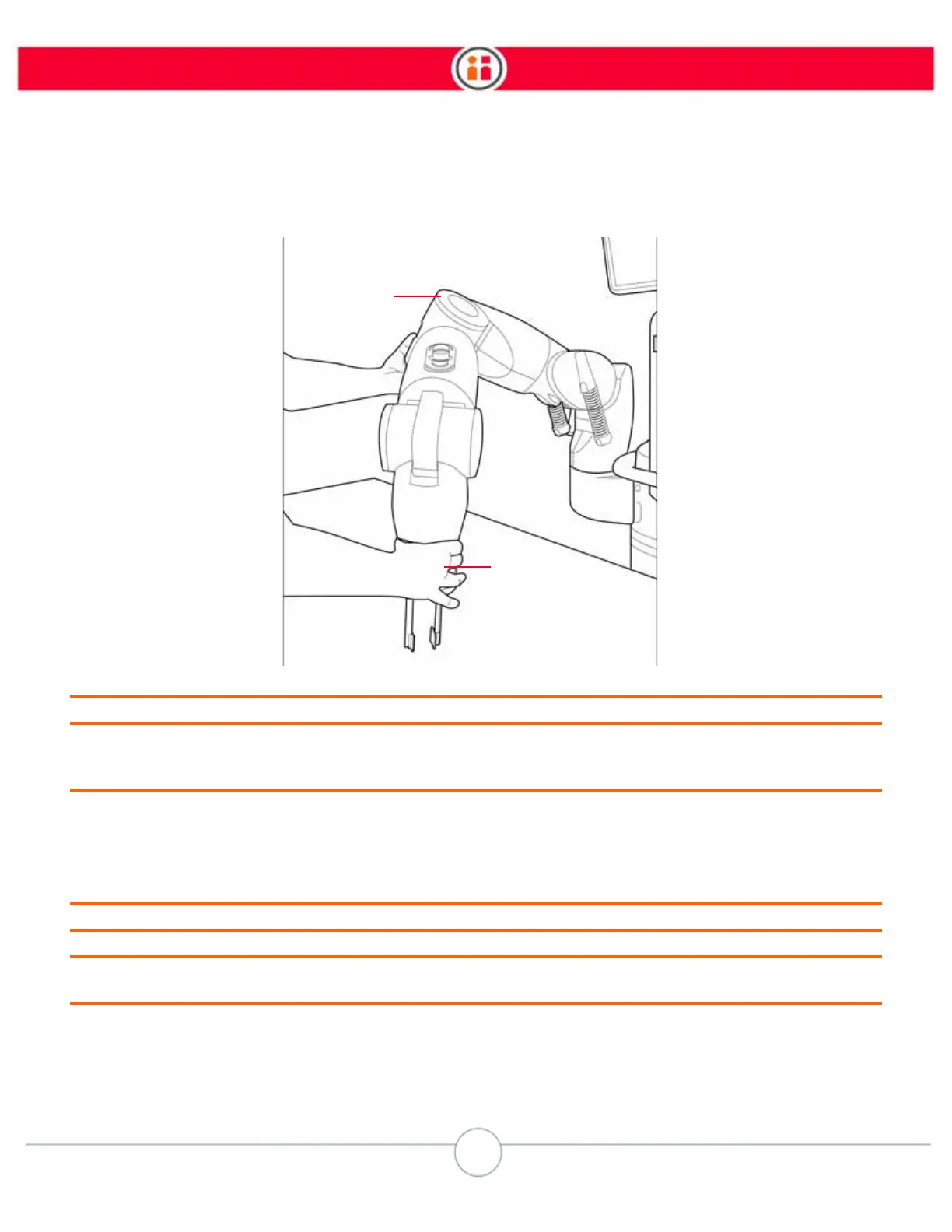
When grasping the training cuff, you can move the arms by either repositioning the lower arm or
changing the height of the elbow.
Grasping Objects
Training involves showing Baxter how to pick up and place objects.
To move the lower arm: While squeezing the cuff (1), move the robot’s arm to the desired location.
To move the elbow: By design, the elbow (2) will try to maintain its current height and will spring back if
you do not actively reset it. While squeezing the cuff, move the elbow to the desired position. Continue to
hold the elbow at the new location, and release the cuff. This will reset the elbow at the new position.
To grasp an object: Position the gripper over the object, press Grasp.
To release an object: With an object in the robot's hand, press Grasp.
To open or close the gripper without creating a pick or place: Without an object in hand, press Grasp
twice quickly.