62
Intera 3.2
Training and Managing Tasks
Modifying Actions
Modifying a Pick Action
You will want to modify a Pick action if:
• The surface (such as a conveyor belt) is moving.
• The location will vary more than 0.2 in (0.5 cm).
• The robot needs to identify a specific object.
• You want the task to include a count.
• You need to adjust the entry/exit height
• You want that part of the task to start based on a signal or send out a signal when
finished.
Note:
You can only modify a Pick with the arm on which it was originally trained.
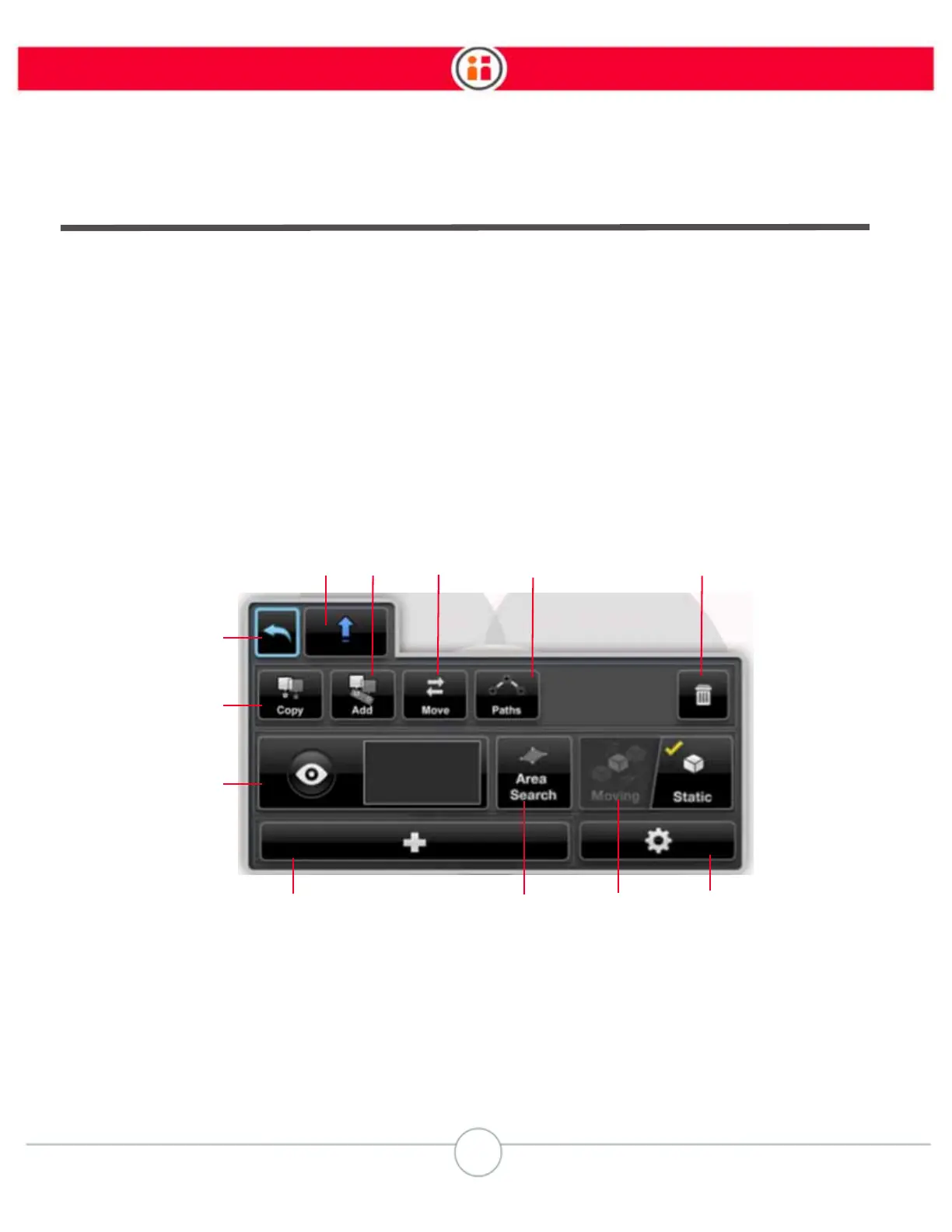
1. Back – Close the modify screen and return to the task map.
2. Arm and action – Indicates the arm being modified (blue for right, green for left)
and the action, in this example, a Pick.