175
Intera 3.2
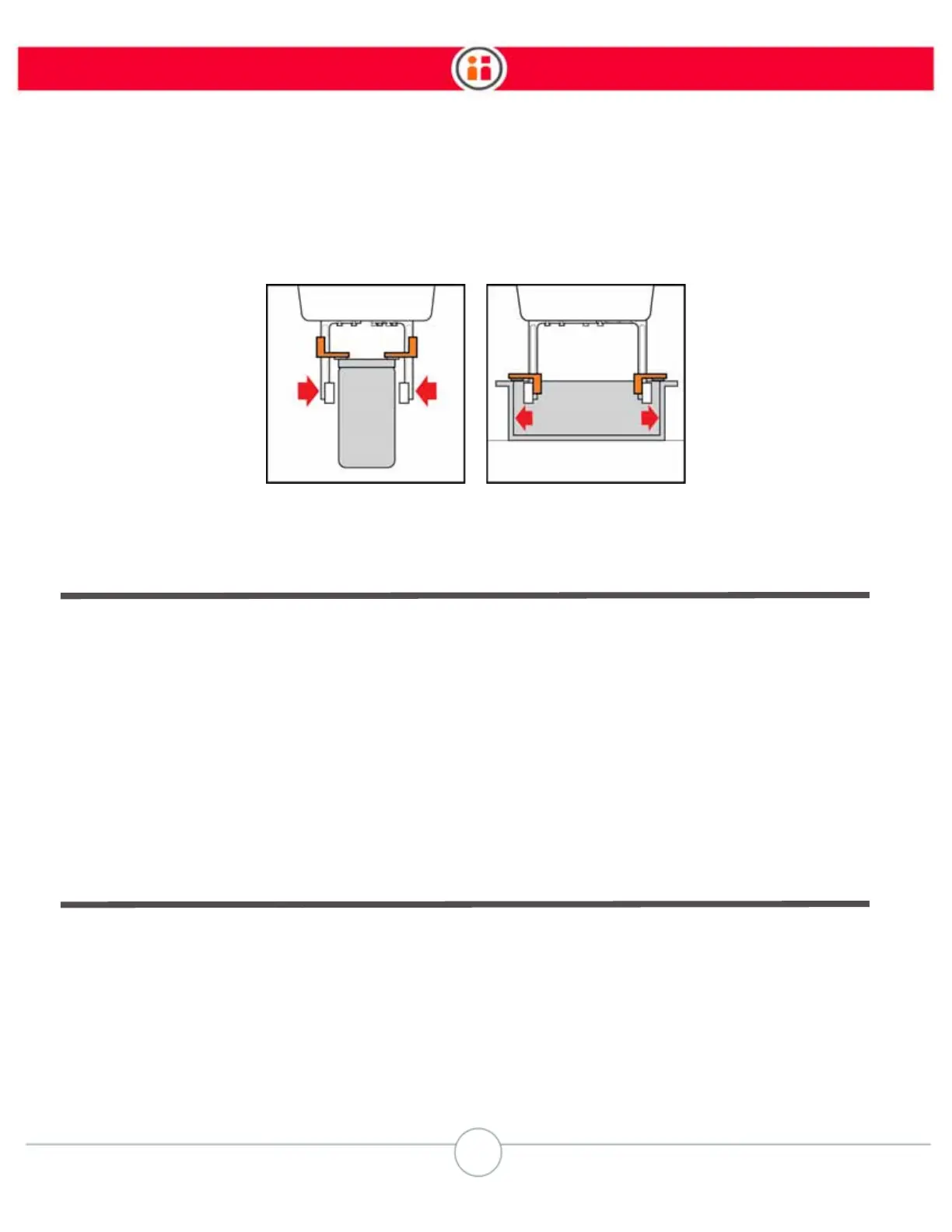
You may also want to try different locations on the object for grasping. Consider which would be
better—an “outside grasp” shown in the left illustration below, or an “inside grasp” shown on the
right.
Object Training and Visual Search
• Visual search works only for vertical tasks.
• Generally, using a visual search area will take more time to complete a task.
• Keep the work surface clear of clutter.
• Choose solid-color work surfaces.
• Glare from the object or surface can affect object training.
• Aim to have high contrast between an object and the surface.
• Baxter cannot learn an object if it is moving during training.
• See “Training a Pick Using Vision” on page 36 and “Camera Settings” on page 45
for more details about how to effectively train Baxter using vision.
Conveyors
• Pick actions from conveyors require object training and a visual search area;
Baxter cannot learn a blind, moving, Pick action.
• Trace the smallest possible visual search area necessary for the robot to be able
to find the object and complete the Pick action along the conveyor.
o If the object is located in the center of the conveyor widthwise, trace a
narrower area that runs lengthwise along the conveyor.
Outside grasp
Inside grasp