7 Parameter menu
Operating instructions for actuators type AB with SMARTCON control unit
OM-ENGLISH-CSC-V2.08-2019.11.07
the parameter value must still be saved by flipping the selector switch halfway up and letting it snap back to the
neutral position (see Figure 52 til Figure 54, page 22).
7 Parameter menu
For each parameter group, you can find a description, tabular overview of the menu items and possible config-
urations. The parameter list below also includes all possible options per menu item. Please note that some of
the menu items listed and described may not be delivered with your configuration.
7.1 Parameter group: End limit
These parameters are used to configure the end position and switch off behavior of the actuator. In this re-
gards, it is important to ensure that the basic mechanical configuration described in section 5.3, page 13 ans
section 5.7, page 14 has already been made.
Ensure that these parameters are set during commissioning before operating the actuator.
In addition, the settings in the "Torque" menu (see section 7.2, page 25 must be compared
with the permissible values of the valve and corrected as appropriate)
CAUTION: Generally, 100% stands for fully open and 0% for fully closed. Please not that
these values cannot be changed.
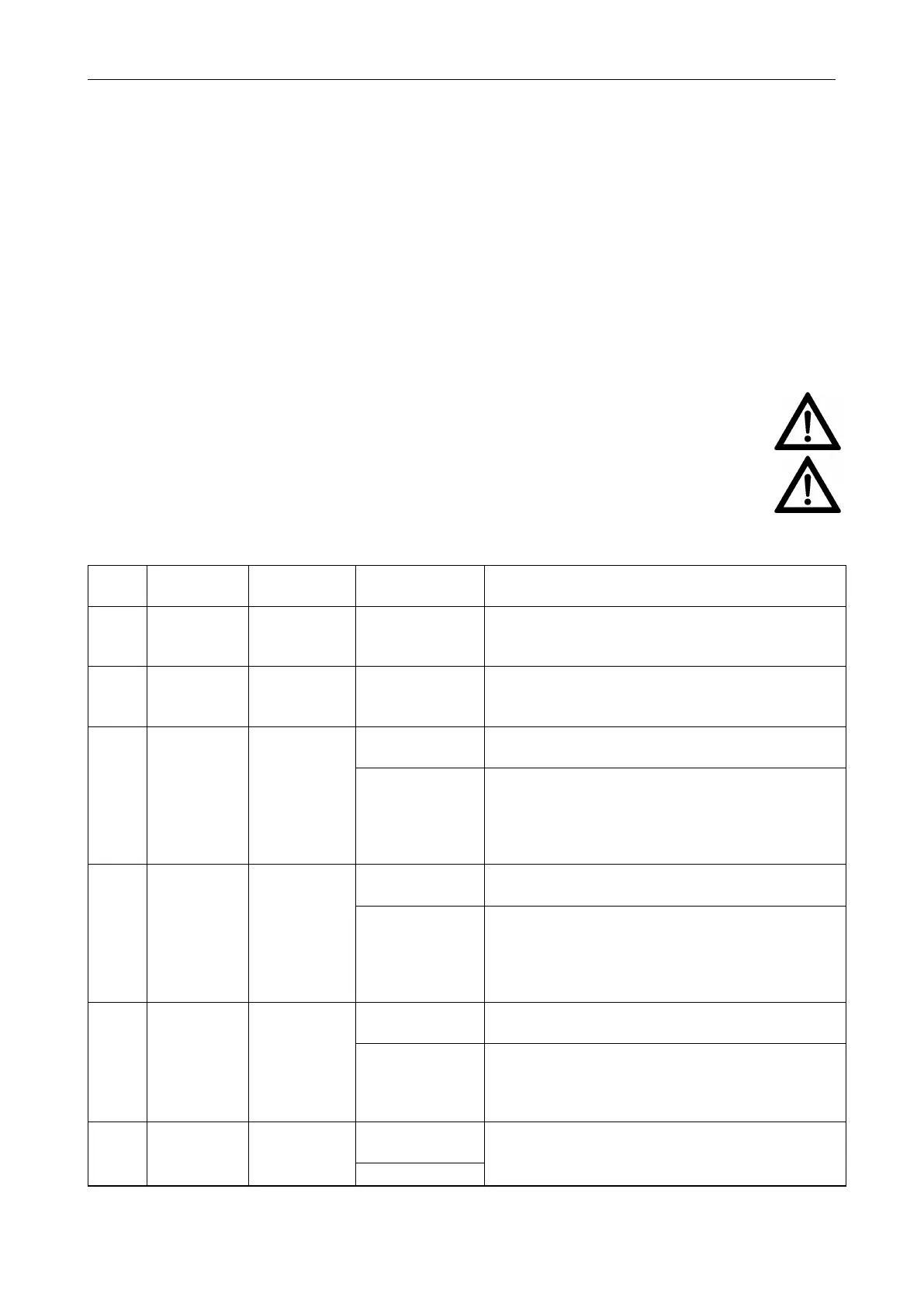
menue item
sub menue
item
poss. setting notes / comments
P1.1 End limit Open
TEACHIN;
0 - 100%
The parameter value can be set using TEACHIN.
With a known travel, the second end position can
be entered after setting the first end position
P1.2 End limit Close
TEACHIN;
0 - 100%
The parameter value can be set using TEACHIN.
With a known travel, the second end position can
be entered after setting the first end position
P1.3 End limit
Switch off
Open
by travel (0)
The actuator uses end-position signals to switch off
and report the end position
by torque (1)
The actuator signals the end position or stops the
motor only after reaching the specified torque with
the proviso that it has reached the end position. If
the end position signal is not reached, the actuator
reports an error
P1.4 End limit
Switch off
Close
by travel (0)
The actuator uses end-position signals to switch off
and report the end position
by torque (1)
The actuator signals the end position or stops the
motor only after reaching the specified torque with
the proviso that it has reached the end position. If
the end position signal is not reached, the actuator
reports an error
P1.5 End limit
Closing
directing
right (0) Actuator is designed for clockwise = closing
left (1)
Reverse direction of rotation! Counterclockwise =
closing.
The crossing of all signals and commands is
performed by the controller
P1.6 End limit
Rot. sense
pos.
0 Rotation sense of the Potentiometer
1
continued on next page
24
 Loading...
Loading...

