Operating instructions for actuators type AB with SMARTCON control unit
OM-ENGLISH-CSC-V2.08-2019.11.07 7 Parameter menu
continued from previous page
Menu item
Sub-menu
item
poss. setting Notes / comments
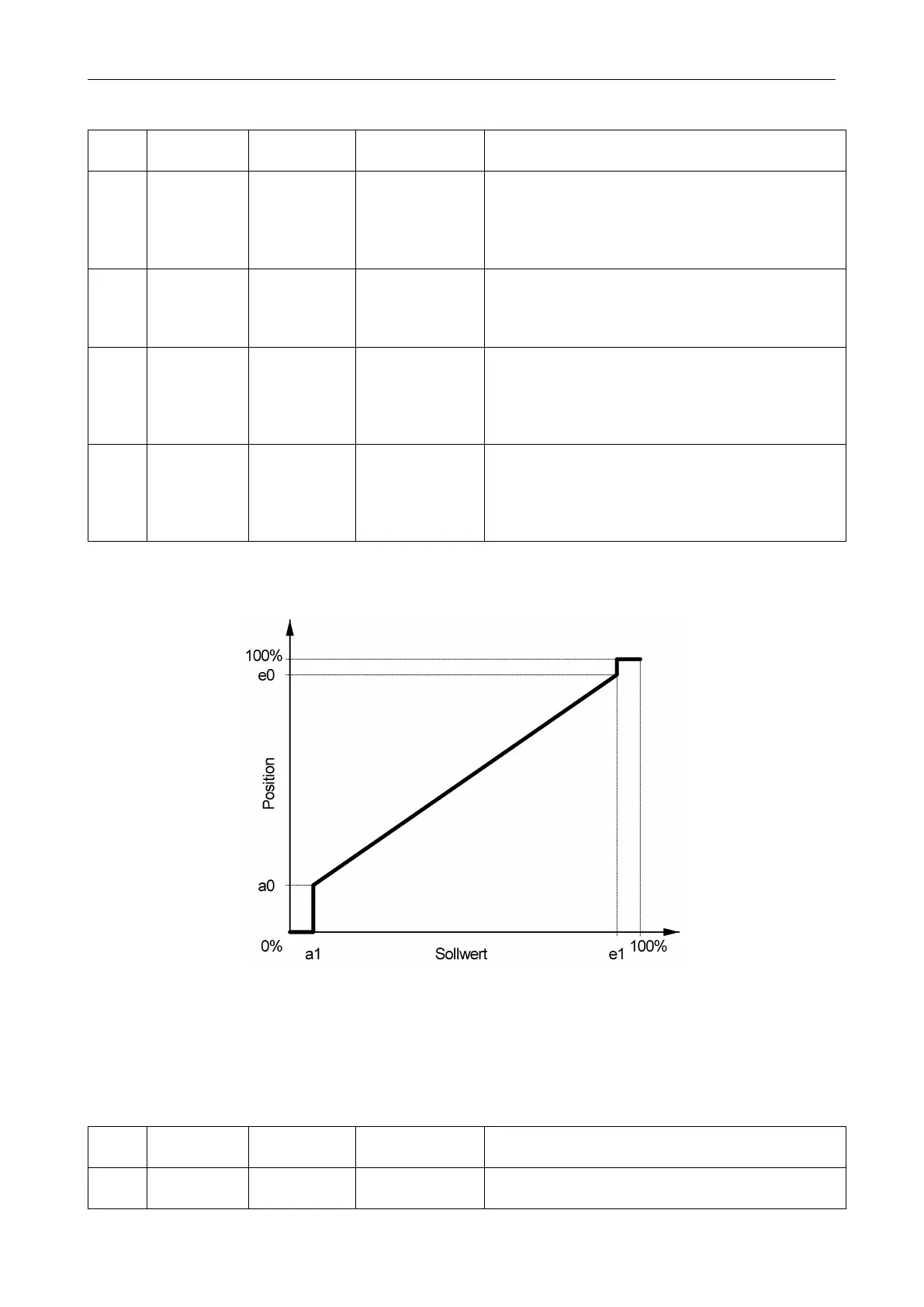
P13.11 Positioner
Begin pos.
(a0)
0.0 – 25.0%
{2.0%}
Smallest controllable position other than the end
position CLOSED. The range 0% . . . a0 is just
passed through. Use the parameter a0 to define
the beginning of the allowable control range of the
valve (e.g., blind spot for ball segment valves, etc.).
P13.12 Positioner End pos. (e0)
75.0 – 100.0%
{98.0%}
Largest controllable position other than the end
position OPEN. The range e0 . . . 100% is just
passed through. Use the parameter e0 to define
the end of the allowable control range of the valve.
P13.13 Positioner
Begin setp.
(a1)
0.0 – 25.0%
{2.0%}
Below this value, the end position CLOSED is
controlled. Control is not possible in the range 0%
. . . a1 (end position tolerance). The initial setpoint
a1 is associated with a small hysteresis (1/4 of the
deadband).
P13.14 Positioner
End setp.
(e1)
75.0 – 100.0%
{98.0%}
Above this value, the end position OPEN is
controlled. Control is not possible in the range e1
. . . 100% (end position tolerance). The final
setpoint e1 is associated with a small hysteresis
(1/4 of the deadband).
Figure 63: Assigning the position to the setpoint
7.13 Parameter group: PID controller (optional)
The optional PID controller is used for controlling an external actual value (process variable) to a setpoint using
0/4-20 mA signal by readjusting the actuator.
Menu item
Sub-menu
item
poss. setting Notes / comments
P14.1
PID-
controller
Function 0: disabled PID controller disabled
continued on next page
37