Encoder Parameters/Attributes
22 ATM60 / ATM90 / KHK53
Dec 2021
6 Encoder Parameters/Attributes
6.1 General Conditions for Using the Scaling Function
6.1.1 Specification for Using the Encoder in “Continuous Mode”
If a rotary absolute encoder exceeds the physical measuring range [PMR], it continues to count
either with its minimum value [PminVal] (0) or its maximum value [PmaxVal], depending on the
direction of rotation (i.e. it wraps around). Successful counting, relating to position readout, is
only ensured if the scaled measuring range [CMR] is an integer multiple of [PMR]. The mapping
of the [CMR] on the [PMR] with an offset (residual value through non-integer multiple) leads to
an incorrectly scaled position value (no monotonous counting sequence). – Possible solutions:
a) Mapping the scaled measuring range in the physical measuring range and adapting the re-
sulting offset. The physical measuring range exceeds the limits or falls within the limits. The
offset value must be stored in a non-volatile RAM (EEPROM), to ensure – after switching off
and on again – the correct conversion of the physical position value to the scaled position
value.
b) Selecting the scaled measuring range such that it can be mapped completely
in the physical
measuring range (without resulting offset). This means a possible adaptation of the config-
ured CMR value.
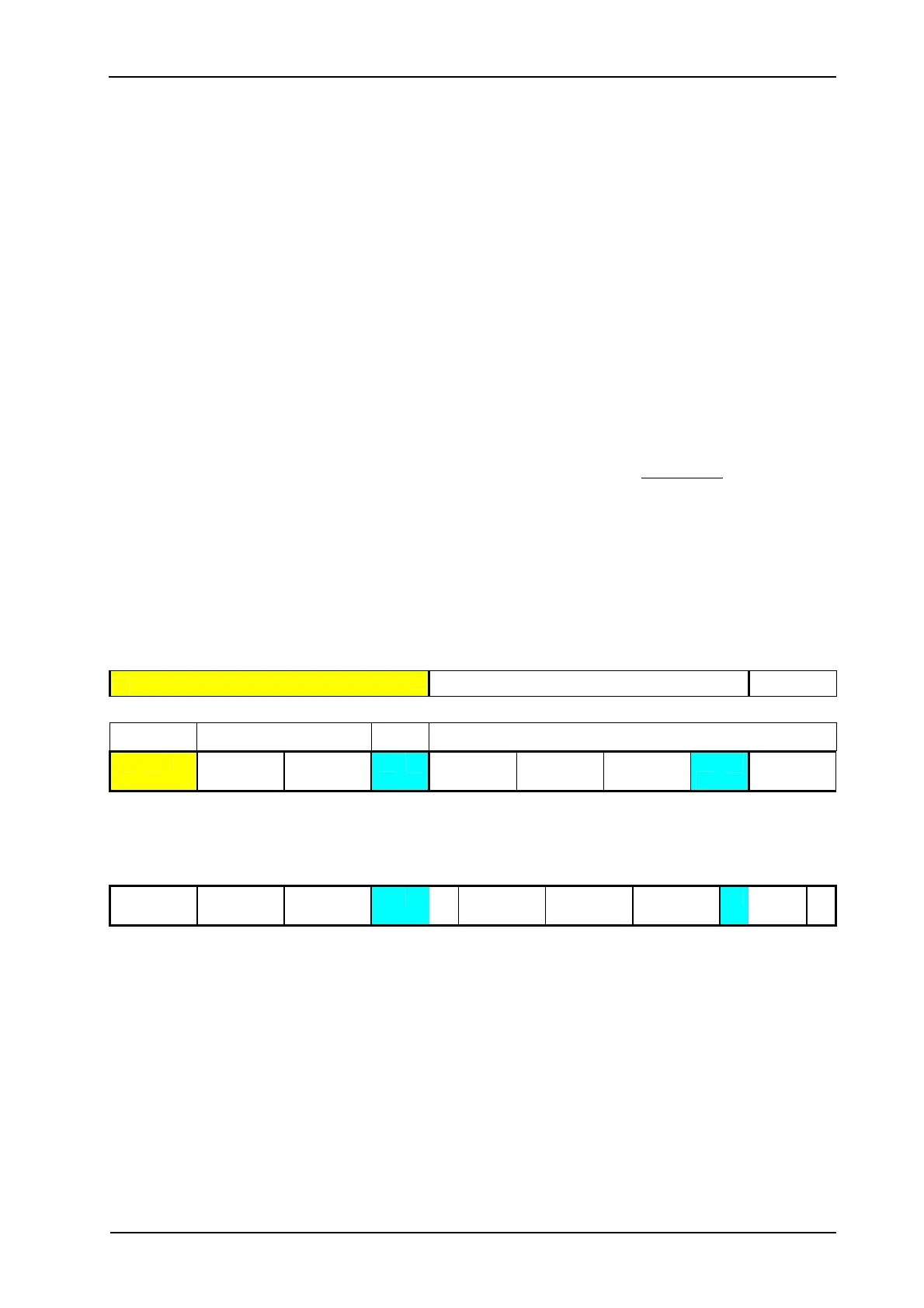
The following illustration shows an example of the relationship between the two measuring
ranges.
[0...N] = Minimum/maximum values of the physical measuring range [PMR].
[0...M] = Minimum/maximum values of the scaled measuring range [CMR].
0
phys. measuring range (PMR) -1
N
0
phys. measuring range (PMR) -2
N
0
CMR - 1 CMR - 2 CMR - 3 offset
0
M
0
M
0
M
0 0
M
0
M
0
M
0 0
Without considering the resulting offset, the scaled position values are no longer correct. The
encoder changes from one physical measuring range to the next.
0 M 0 M0 M 0 M0 M0 M0 M 0 M
The offset is used to calculate a correctly scaled position value. When changing from one
physical measuring range to the next, the offset value itself must be adapted.
6.1.2 Case a) Scaling Function without Limitation to the Measuring Range (with Offset)
The scaled measuring range is mapped into the physical measuring range. A (possibly result-
ing) offset is used to ensure the correct conversion of physical position values to scaled posi-
tion values. The customer-specified value for CMR is not matched to obtaining a 2
N
value for
the relationship between CMR and CPR. -- The following limitations are defined:
• Relationship (quotient) between CMR and CPR (R) must be greater than or equal to 1.