Encoder Parameters/Attributes
28 ATM60 / ATM90 / KHK53
Dec 2021
6.4.2 Speed Value
The calculation of the speed value is based on the physical position value and is performed in
cycles of 50 ms.
To prevent short-time variations, an integration time of 1 sec. is used. For this, a mean value is
calculated from a data table of the respective last 20 position values. A new position value is en-
tered in the same cycle.
The display format of the current value and limit values (minimum, maximum) are defined as
standard. A change in the general display format causes an adaptation of the limit values.
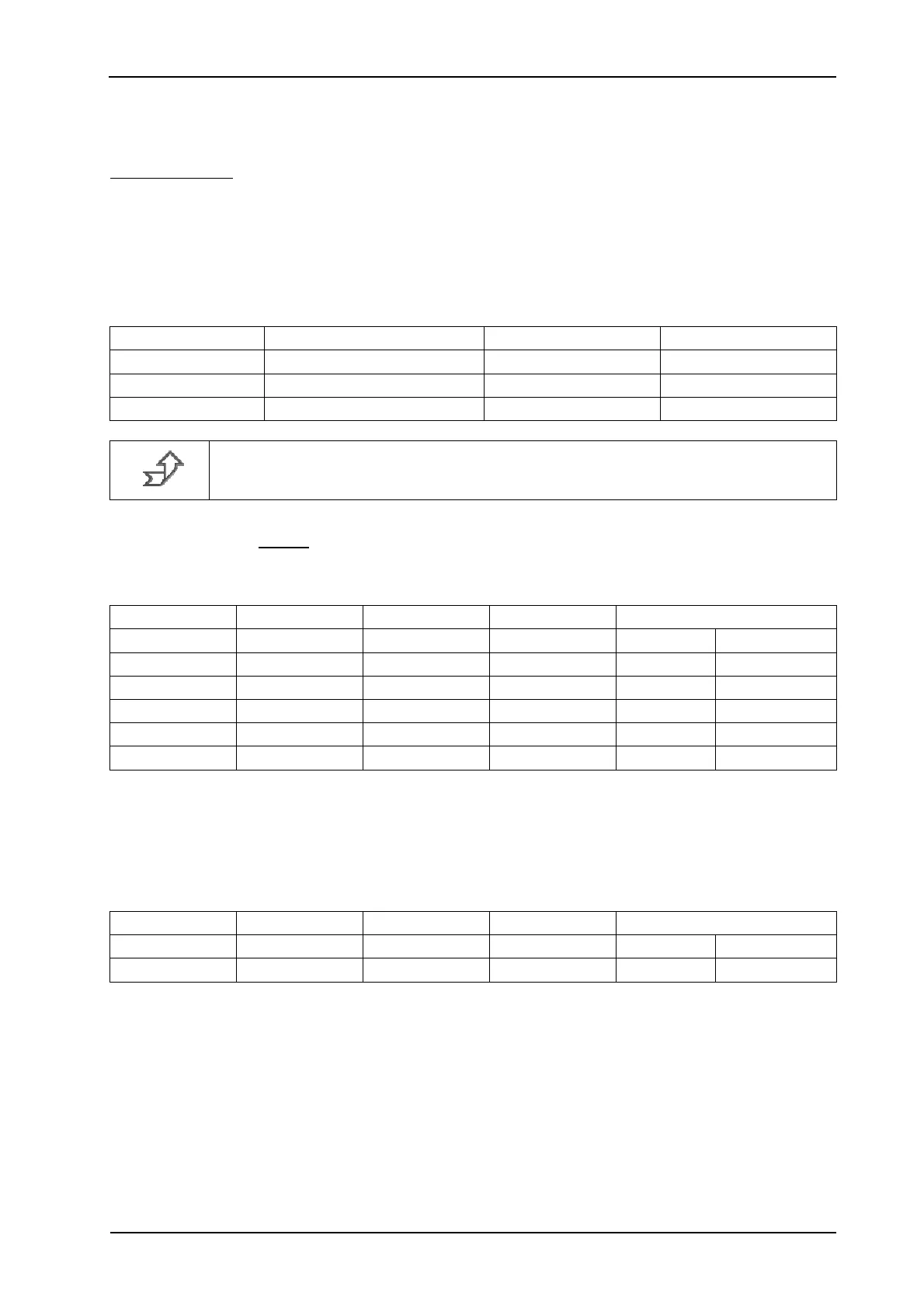
Overview of the different format settings – (depending on the device type).
Display format Limit value (min.) Limit value (max.)
ATM60-P RPM 0 6,000
ATM90-P RPM 0 6,000
KHK53-P 01METpM (0.1 m/min.) 0 3,600
Changing the display format and limit value is not supported! -- The 'default' val-
ues apply!
The speed value is signed
. Changes in direction of rotation or changes to the 'counting direc-
tion’ parameter affect the display value.
Example: Seen as INT value (signed 16-bit) in the "Big Endian" data format.
Byte_1 Byte_2 (LSB) Format/value
0 0 0 0 0
1 7 7 0 RPM 6,000 (max.)
E 8 9 0 RPM -6,000 (max.)
E 8 9 0 01METpM 3,600 (max.)
F 1 1 0 01METpM -3,600 (max.)
6.4.3 Time Stamp
2-byte counter for external time measurement. The value is updated in time pulses of 1 ms.
Range of values of { 0...65,535 }, corresponding with 65,535 seconds.
Example: Seen as UINT value (16-bit) in the "Big Endian" data format.
Byte_1 Byte_2 (LSB) Format/value
0 0 0 0 0
F F F F MS 65,535