Device Inte
ration/Pro
ectin
Dec 2021
ATM60 / ATM90 / KHK53 33
7.4.2 Parameter Settings – Rotary
Encoders
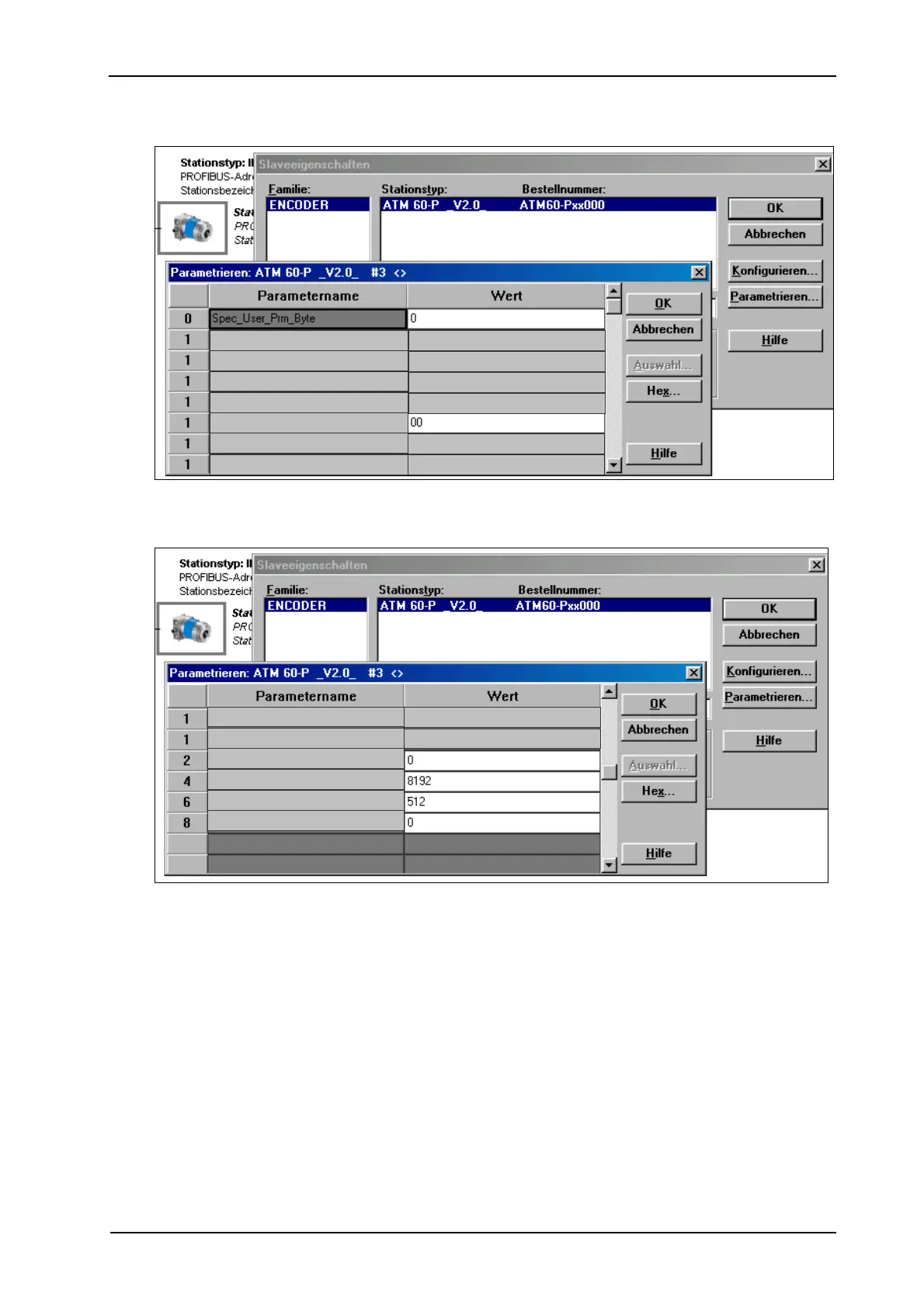
Figure 7–4: Parameter Data – Operating Mode
Figure 7–5: Parameter Data – Scaling
The factory default setting of the parameters is shown:
• Operating mode addressed at position byte 1.
• Measuring units per revolution addressed at position byte 2…5.
• Measuring range addressed at position byte 6…9.
Code sequence
Class 2 function
Additional diagnostics
Scaling function
Reserved
SSA service
Address source
Clockwise
Enabled
Enabled
Enabled
Disabled
DIP switch
SSA service
Disabled
DIP switch
Address source
Steps per turn - -(31_16)
Steps per turn - -(15_00)
Measuring range (Steps)- -(31_16)
Measuring range (Steps)- -(15_00)