DocID13902 Rev 15 650/1128
RM0008 Controller area network (bxCAN)
689
bxCAN can be woken up (exit Sleep mode) either by software clearing the SLEEP bit or on
detection of CAN bus activity.
On CAN bus activity detection, hardware automatically performs the wakeup sequence by
clearing the SLEEP bit if the AWUM bit in the CAN_MCR register is set. If the AWUM bit is
cleared, software has to clear the SLEEP bit when a wakeup interrupt occurs, in order to exit
from Sleep mode.
Note: If the wakeup interrupt is enabled (WKUIE bit set in CAN_IER register) a wakeup interrupt
will be generated on detection of CAN bus activity, even if the bxCAN automatically
performs the wakeup sequence.
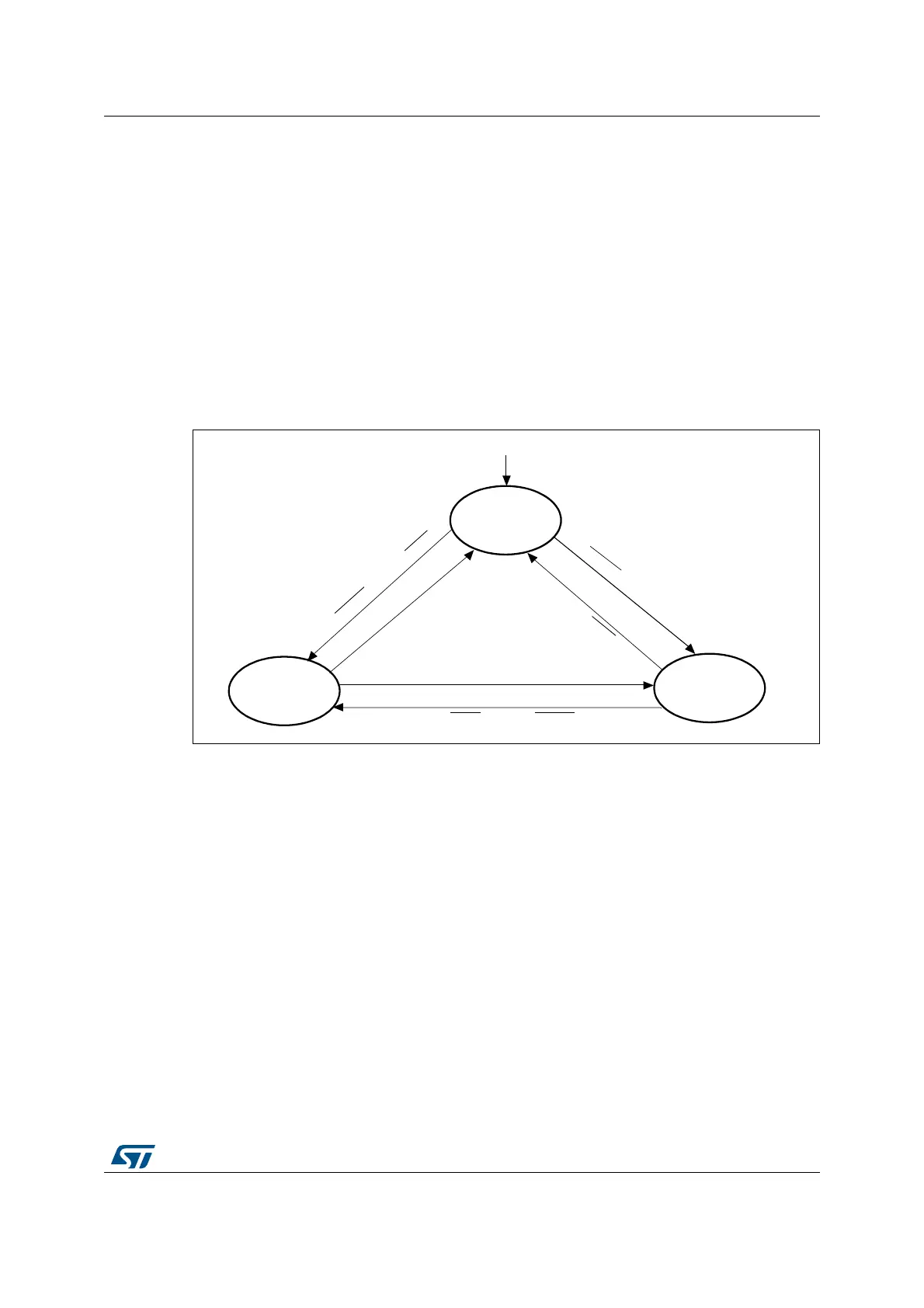
After the SLEEP bit has been cleared, Sleep mode is exited once bxCAN has synchronized
with the CAN bus, refer to Figure 223: bxCAN operating modes. The Sleep mode is exited
once the SLAK bit has been cleared by hardware.
Figure 223. bxCAN operating modes
1. ACK = The wait state during which hardware confirms a request by setting the INAK or SLAK bits in the
CAN_MSR register
2. SYNC = The state during which bxCAN waits until the CAN bus is idle, meaning 11 consecutive recessive
bits have been monitored on CANRX
24.5 Test mode
Test mode can be selected by the SILM and LBKM bits in the CAN_BTR register. These bits
must be configured while bxCAN is in Initialization mode. Once test mode has been
selected, the INRQ bit in the CAN_MCR register must be reset to enter Normal mode.
24.5.1 Silent mode
The bxCAN can be put in Silent mode by setting the SILM bit in the CAN_BTR register.
In Silent mode, the bxCAN is able to receive valid data frames and valid remote frames, but
it sends only recessive bits on the CAN bus and it cannot start a transmission. If the bxCAN
has to send a dominant bit (ACK bit, overload flag, active error flag), the bit is rerouted
internally so that the CAN Core monitors this dominant bit, although the CAN bus may
3LEEP
)NITIALIZATION
.ORMAL
2ESET
3,!+
).!+
3,!+
).!+
3,!+
).!+
3
,
%
%
0
)
.
2
1
!
#
+
3
,
%
%
0
)
.
2
1
!
#
+
).21!#+
).21
39.#3,%%0
3
,
%
%
0
!
#
+
3
,
%
%
0
3
9
.
#
)
.
2
1
AI
 Loading...
Loading...







