80
Data
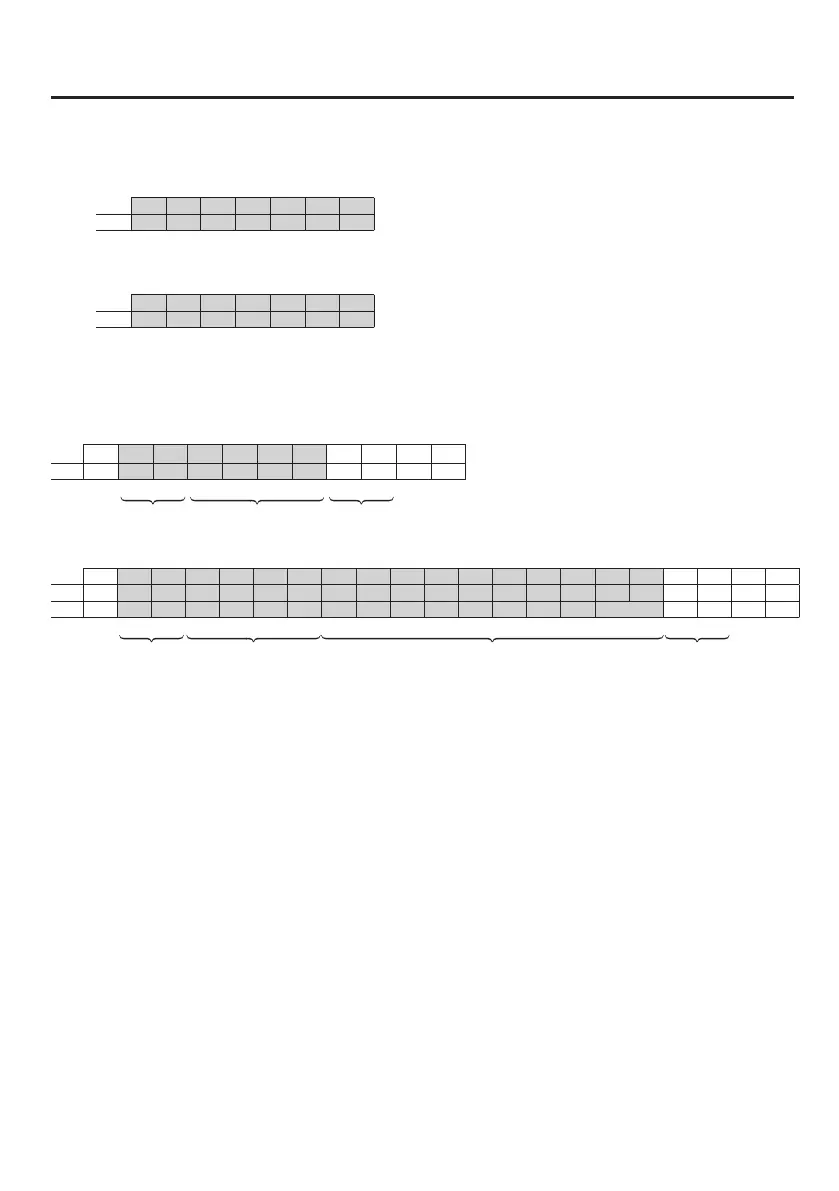
Load value
10: ± sign, 11–16: Load value (including decimal places)
Byte 10 11 12 13 14 15 16
ASCII ± × × × × × ×
Displacement value
18: ± sign, 19–24: Displacement value (including decimal places)
Byte 18 19 20 21 22 23 24
ASCII ± × × × × × ×
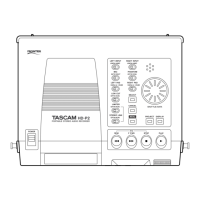
6-1-4-2. Status polling (0006)
This returns the status of the unit.
Command
HEX 0×23 0×30 0×30 0×30 0×30 0×30 0×36 0×32 0×36 0×0D 0×0A
ASCII # 0 0 0 0 0 6 2 6 CR LF
Fixed Command No. Checksum
Response
Byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
HEX 0×06 0×30 0×30 0×30 0×30 0×30 0×36 0×30 0×30 0×30 0×30 0×0D 0×0A
ASCII ACK 0 0 0 0 0 6
CHECK
ST1 ST2 0 0 0 0
SENSOR
WORK × × CR LF
Fixed Command No. Data Checksum
Data
CHECK (measurement complete condition)
0: No, 1: Check
o This becomes 1 when measurement completes and becomes 0 after reading once.
ST1 (command status)
0: Ready, 1: Busy, 2: Error, 3: Continuous transmission active, 4: Sending results automatically
ST2 (measurement status)
0: Continue, 1: Wait, 2: Rec, 3: Stop
0000 (4 digits fixed to 0)
SENSOR (current sensor value memory number)
1–4 (1 digit)
WORK (current work number)
1–16 (2 digits)
6. Communication functions