BL20 - Communication in CANopen
D301087 0308 - BL20 CANopen4-8
The following messages are exchanged in the states mentioned:
Operational: PDO and SDO communication
Pre-Operational: only SDO communication
The services listed above (1 to 14) are required by CANopen or
performed independently by the nodes in order to change from one
state to another.
The "Stopped" state can be skipped when using Minimum Boot-up.
1 Power-on (automatic change of state to the "Initialization" state)
2 Initialization finished (automatic change of state to the "Pre-
Operational" state)
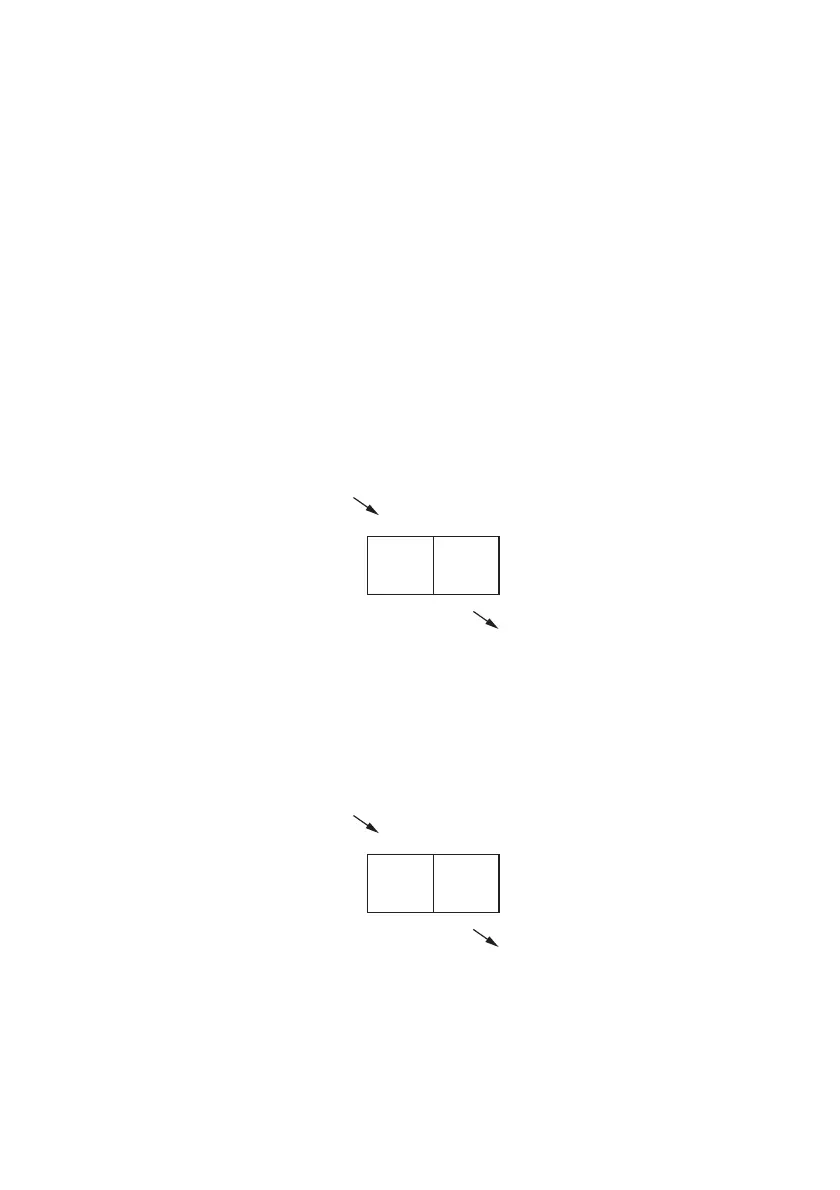
3, 6 Start Remote Node (start the CAN node)
The internal change of state of the CANopen slave now requires
a pause of at least 20 ms, before another request may be made
by the master.
4, 7 Enter Pre-Operational (change over to "Pre-Operational")
The internal change of state of the CANopen slave now requires
a pause of at least 20 ms, before another request may be made
by the master.
Byte 0
Master
Slave
COB-ID = 0
Byte 1
Node-
ID
cs = 1
Byte 0
Master
Slave
COB-ID = 0
Byte 1
Node-
ID
cs = 128