71
align the positioning holes on the two ends of the interface. The male
pins of the connecting cable are relatively thin to avoid bending the
male pins during disassembly.
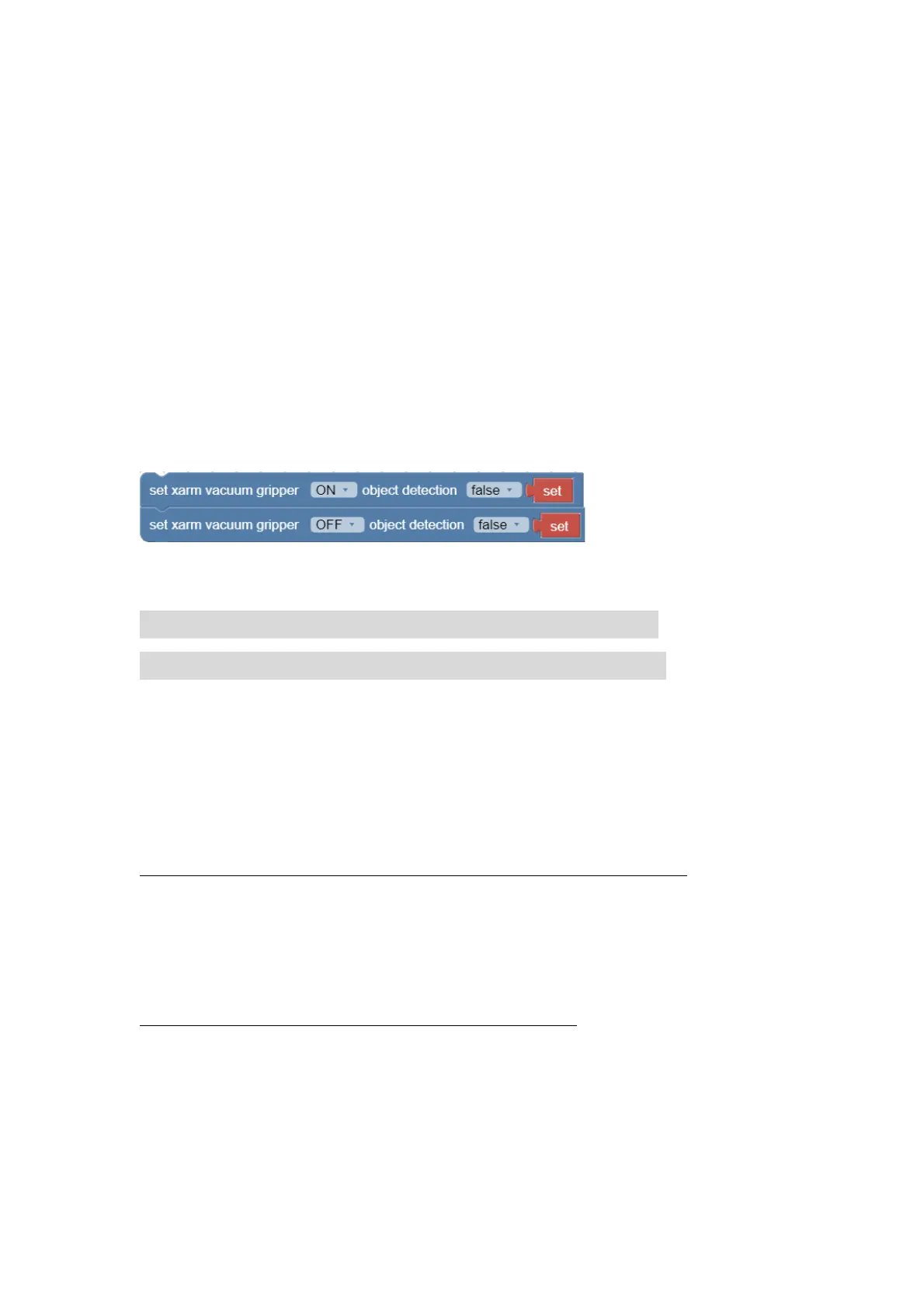
3.2.2. Turn On/Off Vacuum Gripper
Example:
Blockly:
Python-SDK:
arm.set_vacuum_gripper(True, wait=False) #Turn on vacuum gripper
arm.set_vacuum_gripper(False, wait=False) #Turn off vacuum gripper
Note:
1. Python-SDK and xArm Studio provide wrapped functions that can be
called to turn on/off the vacuum gripper.
xArm Studio-Blockly Command-End Effector-Vacuum Gripper.
2. For detailed instructions on the xArm vacuum gripper, please refer to
the xArm vacuum gripper user manual, download link:
https://www.ufactory.cc/pages/download-xarm