Gripper Driver Type Error
Please click “OK” to re-enable the Gripper.
For alarm codes that are not listed in the above table: enable the robotic arm and gripper. If
the problem remains unsolved after power on/off for multiple times, please contact technical
support.
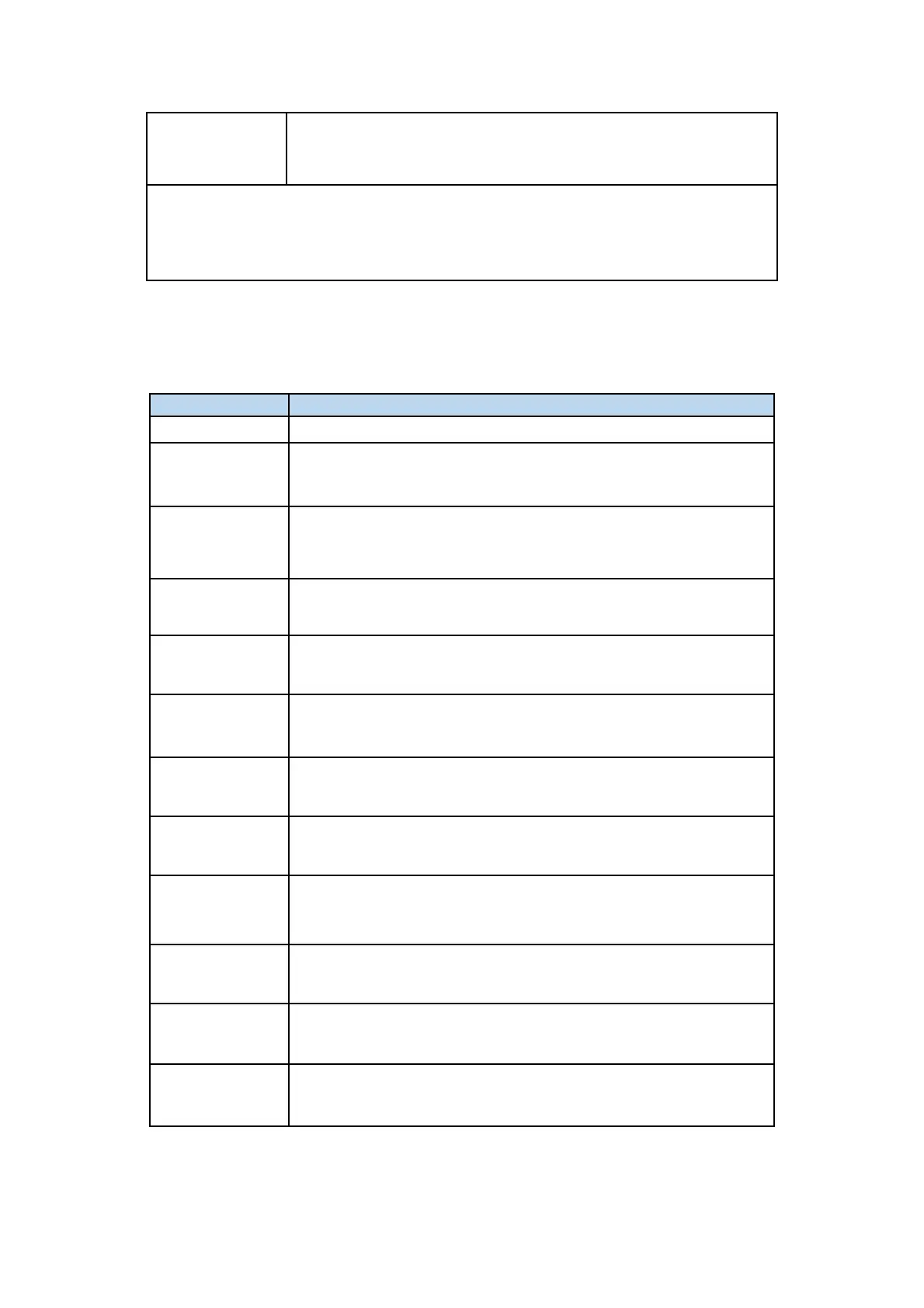
1.4 Python SDK Error Code & Error Handling
The TCP position command is out of the robot arm's motion range.
Please adjust the TCP position command.
xArm is not ready.
Please check whether the robot is enabled and the state is set correctly.
xArm is disconnect or not connect.
Please check the network.
There are errors that have not been cleared.
Please clear the errors and try again.
There are warnings that have not been cleared.
Please clear the warnings and try again.
Get response timeout.
Please check the firmware version and the network.
TCP reply length error.
Please check the network.
TCP reply number error.
Please check the network.
TCP protocol flag error.
Please check the network.
The TCP reply command does not match the sending command.
Please check the network.
Send command error.
Please check the network.