210
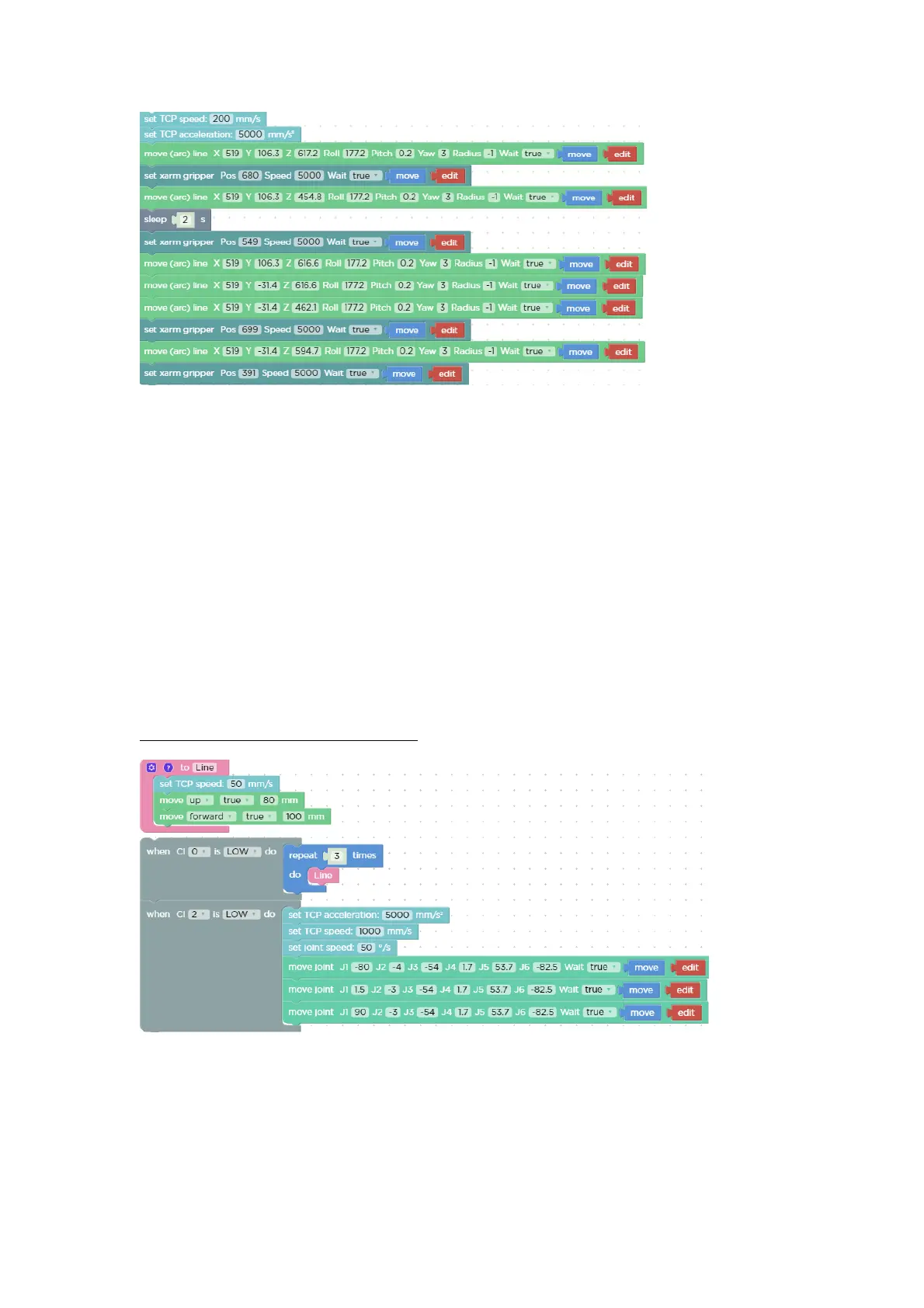
The role of this program: execute this program to control the gripper to
grip the target object at the specified position, and then place the target
object at the target position.
3.3. The Use of the Digital IO
The download address of the Blockly program:
The use of the digital IO.blockly
The role of this program: If you need to use digital IO to control the
motion of the robotic arm, you can trigger the digital IO to perform the
corresponding motion.