Monitoring of safety inputs
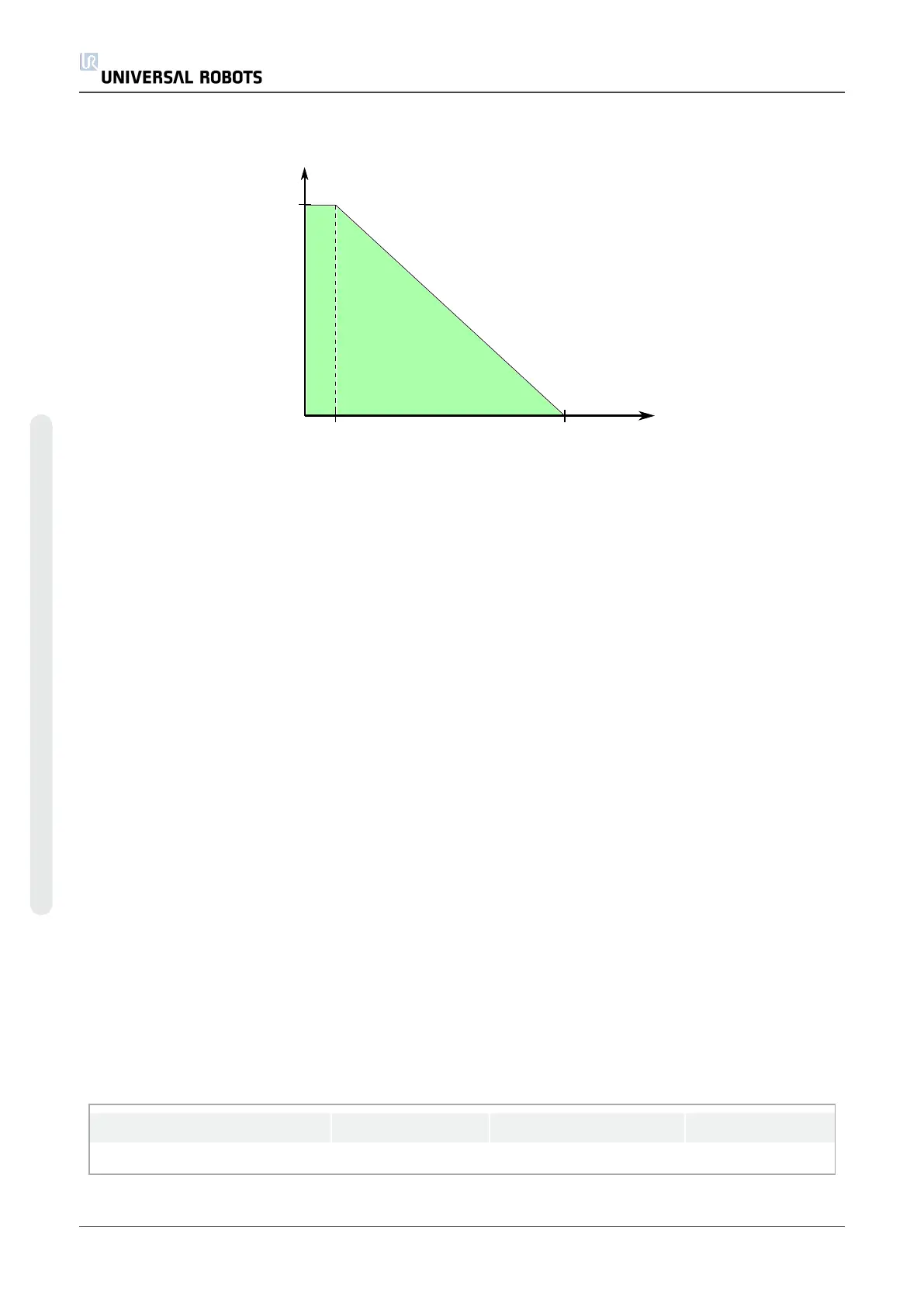
Max joint
speed in
normal
mode
[rad/s]
[s]
time
0.5240.024
4.2:The green area below the ramp is the allowed speeds for a joint during braking. At time 0
an event (emergency stop or safeguard stop) is detected at the safety processor. Deceleration
begins after 24ms.
Stop Category 1 and Stop Category 2 are monitored by the safety system in the following way:
1. The safety system monitors that the braking initiates within 24ms, see Figure4.2.
2. If a joint is moving, its speed is monitored to never be higher than the speed obtained by
constantly decelerating from the maximum joint speed limit for Normal mode to 0rad/s in
500ms.
3. If a joint is at rest (joint speed is less than 0.2rad/s), it is monitored that it does not move
more than 0.05rad from the position it had when the speed was measured below 0.2rad/s.
Additionally, for a Stop Category 1, the safety system monitors that after the robot arm is at rest,
the powering off is finalized within 600ms. Furthermore, after a Safeguard Stop input, the robot
arm is only allowed to start moving again after a positive edge on the safeguard reset input
occurs. If any of the above properties are not satisfied, the safety system issues a Stop Category
0.
A transition to Reduced mode triggered by the reduced mode input is monitored as follows:
1. The safety system accepts both Normal and Reduced mode limit sets for 500ms after the
reduced mode input is triggered.
2. After 500ms, only the Reduced mode limits are in effect.
If any of the above properties are not satisfied, the safety system issues a Stop Category 0.
A Stop Category 0 is performed by the safety system with the performance described in the
following table. The worst-case reaction time is the time to stop and to de-energize (discharge to
an electrical potential below 7.3V) a robot running at full speed and payload.
Safety Input Function Detection Time De-energizing Time Reaction Time
Robot Emergency Stop 250ms 1000ms 1250ms
UR10 18 User Manual
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.