Wecon VD2 SA Series Servo Drives Manual (Lite V1.1)
WECON technology Co., Ltd
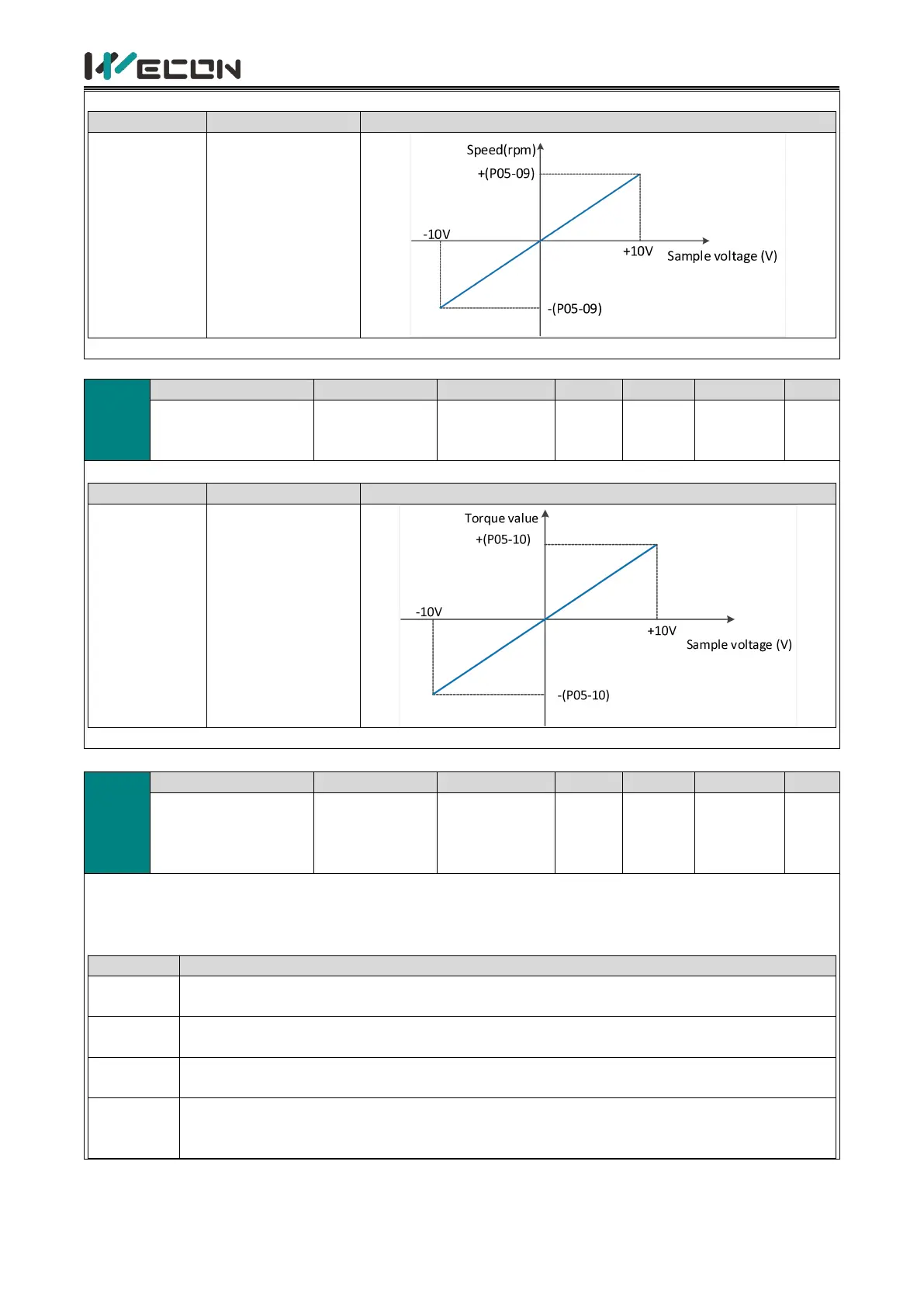
Set the speed value corresponding to the analog 10V
Sampling voltage and speed diagram
Given speed = sampling voltage / 10 * (P05-09)
Analog 10V
corresponds to the
torque value
Set the torque value corresponding to the analog 10V
Sampling voltage and speed diagram
Given torque= sampling voltage / 10 * (P05-10)
Positioning
completion,
positioning approach
condition setting
Set the conditions of setting positioning completion and positioning approach. When servo is in position mode,
and the absolute value of the positional deviation is within the range of P05-12 (positioning complete
threshold) or P05-13 (positioning approach threshold), servo would output the positioning complete signal and
positioning approach signal.
It is valid when the absolute value of the position deviation is smaller than or close to the
threshold
It is valid when the absolute value of the position deviation is smaller than or close to the
threshold and input position instruction is 0
It is valid when the absolute value of the position deviation is smaller than or close to the
threshold and input position instruction filtering value is 0
It is valid when the absolute value of the position deviation is smaller than or close to the
threshold, input position instruction filtering value is 0, and continuous positioning detects
window time
“☆” indicates that the VD2F servo drive does not support this function code.
 Loading...
Loading...