Parameter Details
5
5.4 d: References
YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference 235
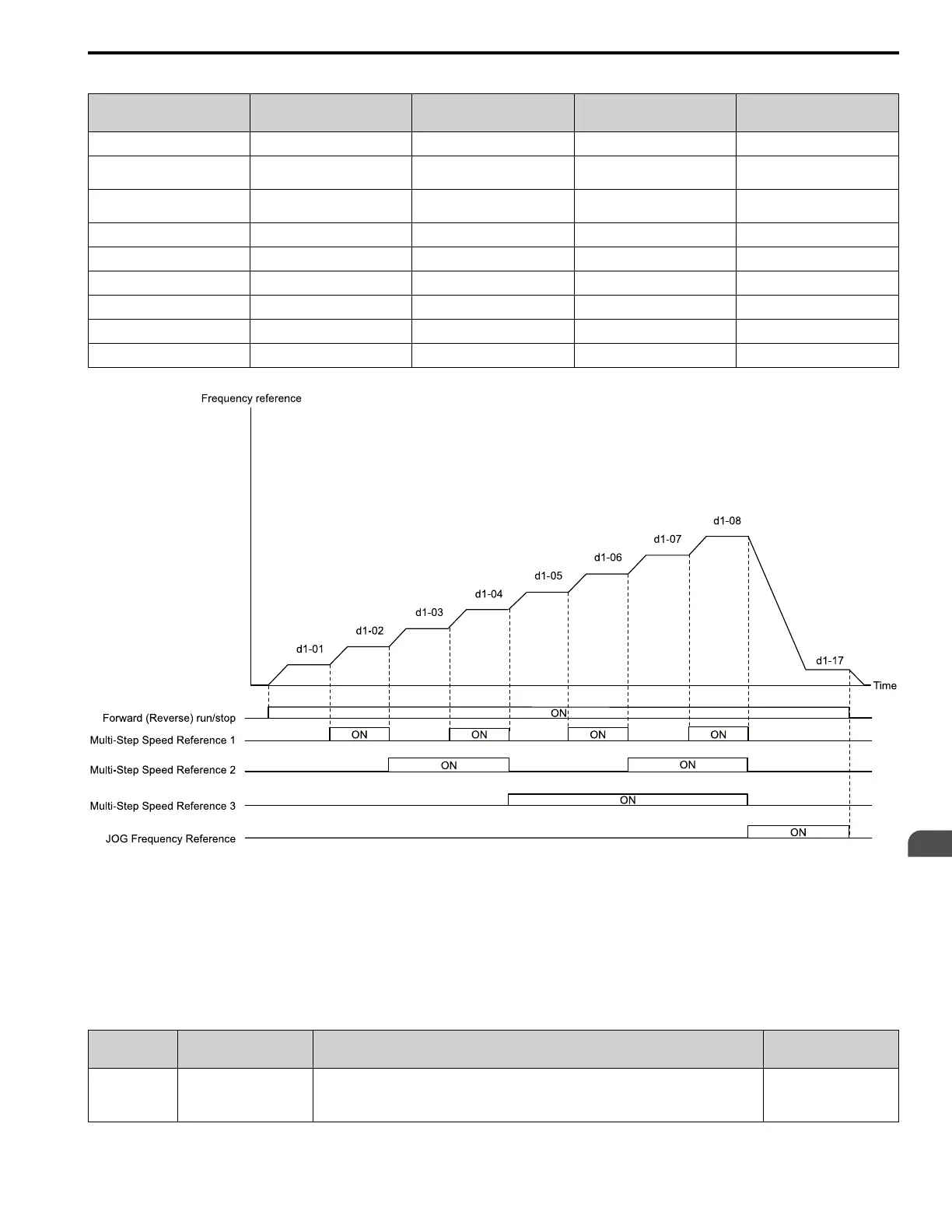
Table 5.32 Multi-step Speed Reference and MFDI Terminal Combinations
Related Parameters
Multi-Step Speed Reference 1
H1-xx = 3
Multi-Step Speed Reference 2
H1-xx = 4
Multi-Step Speed Reference 3
H1-xx = 5
Jog Reference
H1-xx = 6
Reference 1 (set in b1-01)
OFF OFF OFF OFF
Reference 2 (d1-02 or terminals
A1, A2)
ON OFF OFF OFF
Reference 3 (d1-03 or terminals
A1, A2)
OFF ON OFF OFF
Reference 4 (d1-04)
ON ON OFF OFF
Reference 5 (d1-05)
OFF OFF ON OFF
Reference 6 (d1-06)
ON OFF ON OFF
Reference 7 (d1-07)
OFF ON ON OFF
Reference 8 (d1-08)
ON ON ON OFF
Jog Reference (d1-17)
*1
- - - ON
*1 The Jog Frequency Reference (JOG command) overrides all other frequency references.
d1-01: Reference 1
d1-02: Reference 2
d1-03: Reference 3
d1-04: Reference 4
d1-05: Reference 5
d1-06: Reference 6
d1-07: Reference 7
d1-08: Reference 8
d1-17: Jog Reference
Figure 5.33 Time Chart for Multi-step Speed Reference/JOG Reference
■ d1-01: Reference 1
No.
(Hex.)
Name Description
Default
(Range)
d1-01
(0280)
RUN
Reference 1 Sets the frequency reference in the units from o1-03 [Frequency Display Unit Selection. 0.00 Hz
(0.00 - 400.00 Hz)

 Loading...
Loading...









