1.1 A: Initialization
30 YASKAWA ELECTRIC SIEP C710606 10A YASKAWA AC Drive - V1000 PRELIM. Programming Manual
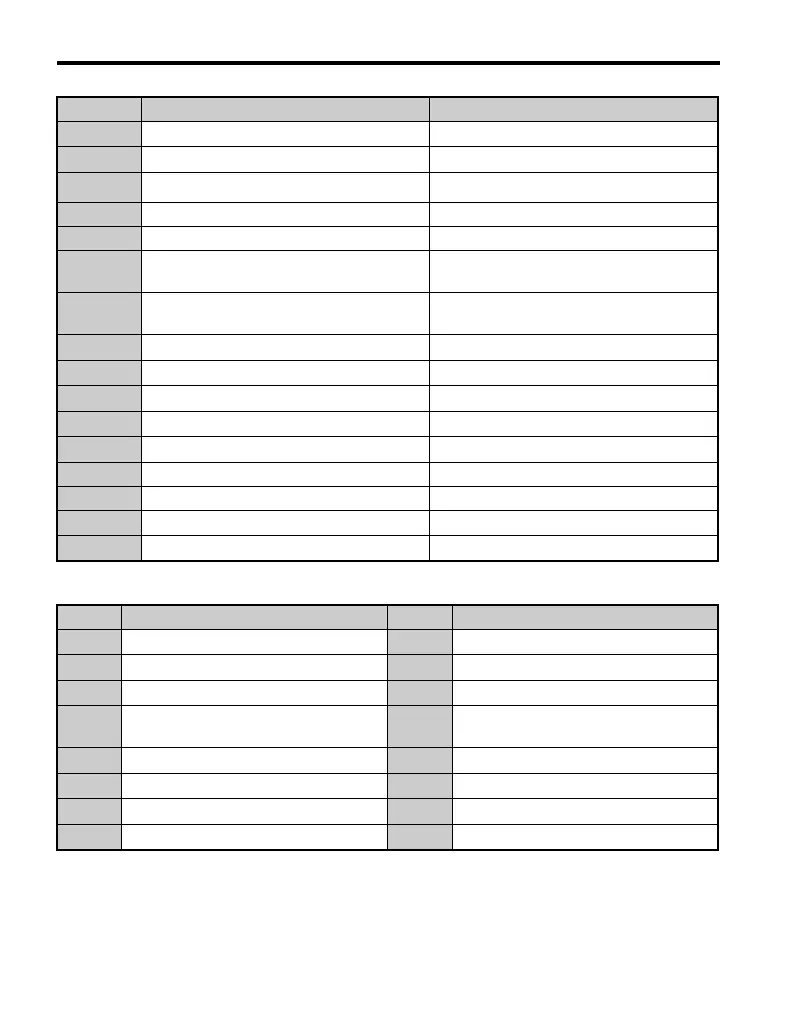
Table 1.16 Hoist: Preferred Parameters (A2-01 to A2-16):
Notes on Controlling the Brake when Using the Hoist Application Preset
1. The frequency detection function is used for controlling the brake.
d1-02 Frequency Reference 2 30.0 Hz
d1-03 Frequency Reference 3 50.0 Hz
E1-03 V/f Pattern Selection 0FH
H2-02 Terminals P1 Function Selection 37: During Frequency Output
H2-03 Terminals P2 Function Selection 5: Frequency Detection 2
L2-03
Momentary Power Loss Minimum
Baseblock Time
0.3 s
L3-04
Momentary Power Loss Voltage Recovery
Ramp Time
0: Disabled
L4-01 Speed Agreement Detection Level 2.0 Hz
L4-02 Speed Agreement Detection Width 0.0 Hz
L6-01 Torque Detection Selection 1 8: UL3 at RUN - Fault
L6-02 Torque Detection Level 1 5%
L6-03 Torque Detection Time 1 0.5 s
L8-05 Input Phase Loss Protection Selection 1: Enabled
L8-07 Output Phase Loss Protection 1: Enabled
L8-38 Carrier Frequency Reduction 1: Enabled below 6 Hz
L8-41 Current Alarm Selection 1: Enabled (alarm is output)
No. Parameter Name No. Parameter Name
A1-02 Control Method Selection d1-02 Frequency Reference 2
b1-01 Frequency Reference Selection d1-03 Frequency Reference 3
b6-01 Dwell Reference at Start E1-08 Mid Output Frequency Voltage
b6-02 Dwell Time at Start H2-01
Terminals MA, MB, and MC Function
Selection
C1-01 Acceleration Time 1 L1-01 Motor Overload Protection Selection
C1-02 Deceleration Time 1 L4-01 Speed Agreement Detection Level
C6-02 Carrier Frequency Selection L6-02 Torque Detection Level 1
d1-01 Frequency Reference 1 L6-03 Torque Detection Time 1
No. Parameter Name Optimum Setting

 Loading...
Loading...









