164 Parameters
24.04 Speed error
inverted
Displays the inverted (unfiltered) speed error. See the control
chain diagram on page 409.
This parameter is read-only.
-
-30000.0…
30000.0 rpm
Inverted speed error. See par.
46.01
24.11 Speed correction Defines a speed reference correction, ie. a value added to the
existing reference between ramping and limitation. This is
useful to trim the speed if necessary, for example to adjust
draw between sections of a paper machine.
See the control chain diagram on page 409.
0.00 rpm
-10000.00…
10000.00 rpm
Speed reference correction. See par.
46.01
24.12 Speed error filter
time
Defines the time constant of the speed error low-pass filter.
If the used speed reference changes rapidly, the possible
interferences in the speed measurement can be filtered with
the speed error filter. Reducing the ripple with this filter may
cause speed controller tuning problems. A long filter time
constant and fast acceleration time contradict one another. A
very long filter time results in unstable control.
0 ms
0…10000 ms Speed error filtering time constant. 0 = filtering disabled. 1 = 1 ms
25
25 Speed control
Speed controller settings.
See the control chain diagram on page 409.
25.01 Torque reference
speed control
Displays the speed controller output that is transferred to the
torque controller. See the control chain diagram on page 409.
This parameter is read-only.
-
-1600.0…1600.0% Limited speed controller output torque. See par.
46.03
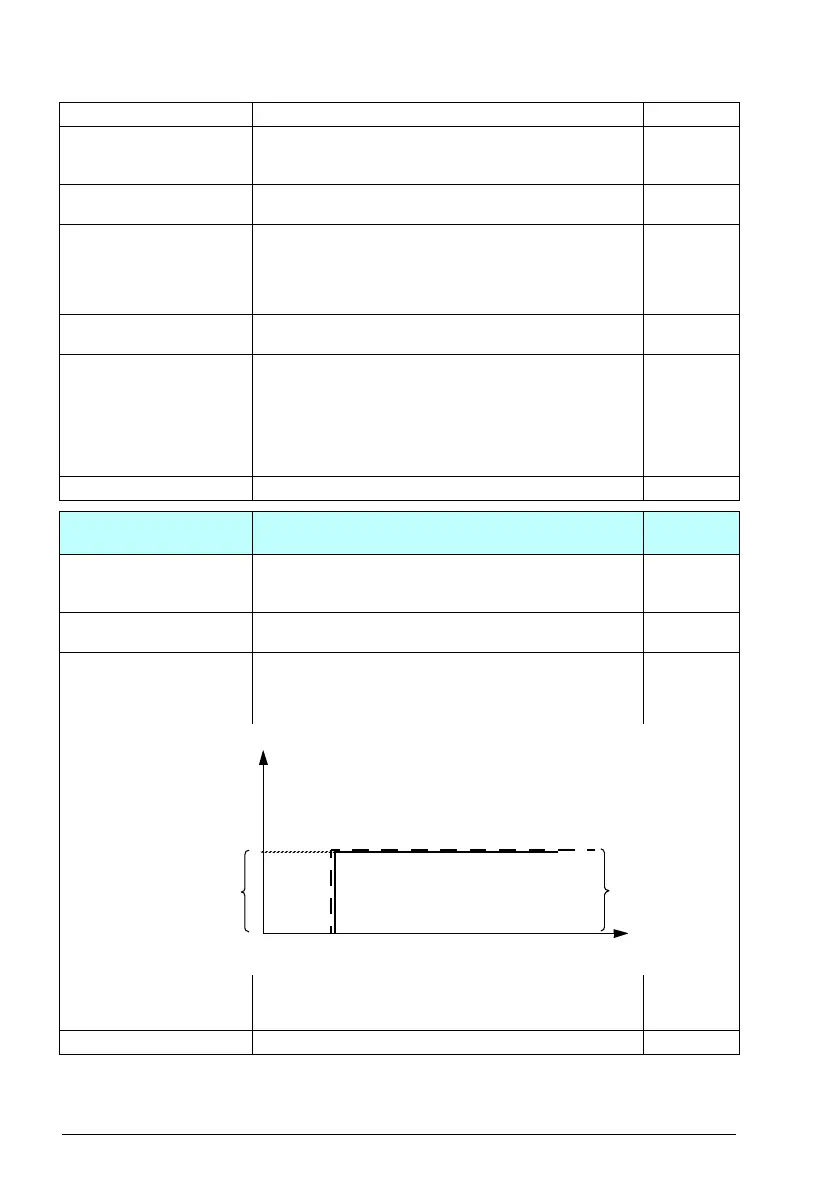
25.02 Speed proportional
gain
Defines the proportional gain (K
p
) of the speed controller. Too
high a gain may cause speed oscillation. The figure below
shows the speed controller output after an error step when
the error remains constant.
10.00
If gain is set to 1, a 10% change in error value (reference -
actual value) causes the speed controller output to change by
10%, ie. the output value is input × gain.
0.00…250.00 Proportional gain for speed controller. 100 = 1
No. Name/Value Description Def/FbEq16
Gain = K
p
= 1
T
I
= Integration time = 0
T
D
= Derivation time = 0
%
Controller
output = K
p
×e
Time
e = Error value
Controller output
Error value

 Loading...
Loading...









