492 Parameters
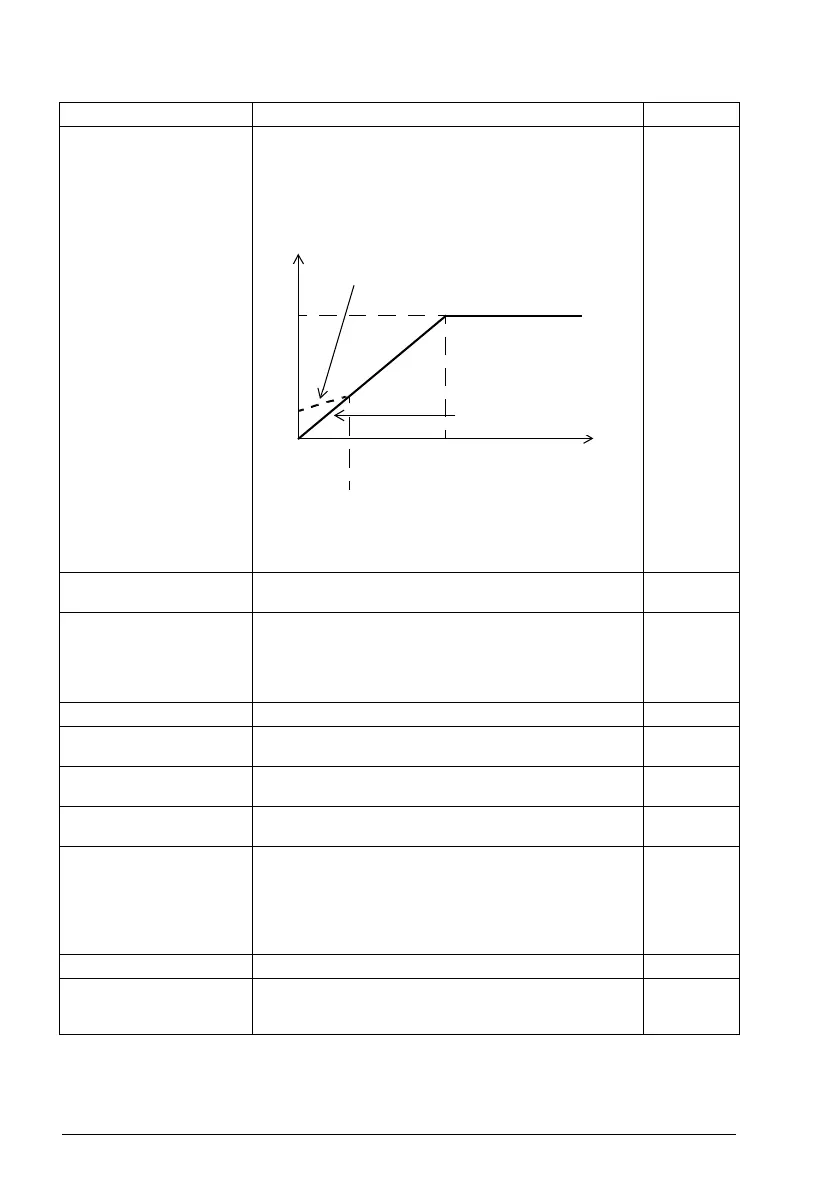
97.13 IR compensation Defines the relative output voltage boost at zero speed (IR
compensation). The function is useful in applications with a
high break-away torque where direct torque control (DTC
mode) cannot be applied.
See also section IR compensation for scalar motor control on
page 95.
0.00%
0.00 … 50.00% Voltage boost at zero speed in percent of nominal motor
voltage.
1 = 1%
97.15 Motor model
temperature
adaptation
Selects whether the temperature-dependent parameters
(such as stator or rotor resistance) of the motor model adapt
to actual (measured or estimated) temperature or not.
See parameter group 35 Motor thermal protection for
selection of temperature measurement sources.
Disabled
Disabled Temperature adaptation of motor model disabled. 0
Estimated
temperature
Estimated temperature (35.01 Motor estimated temperature)
used for adaptation of motor model.
1
Measured
temperature 1
Measured temperature 1 (35.02 Measured temperature 1)
used for adaptation of motor model.
2
Measured
temperature 2
Measured temperature 2 (35.03 Measured temperature 2)
used for adaptation of motor model.
3
97.18 Hexagonal field
weakening
Activates hexagonal motor flux pattern in the field weakening
area, ie. above the limit defined by parameter 97.19
Hexagonal field weakening point.
Note: This parameter is only effective in scalar motor control
mode.
See also section Hexagonal motor flux pattern (page 102).
Off
Off The rotating flux vector follows a circular pattern. 0
On The flux vector follows a circular pattern below, and a
hexagonal pattern above, the hexagonal field weakening
point (97.19).
1
No. Name/Value Description Def/FbEq16
U / U
N
(%)
f (Hz)
Field weakening point
Relative output voltage. No
IR compensation.
Relative output voltage with IR
compensation
100%
50% of nominal frequency
97.13

 Loading...
Loading...











