140 Application macros
Torque control macro
This macro is used in applications in which torque control of the motor is required.
These are typically tension applications, where a particular tension needs to be
maintained in the mechanical system.
Torque reference is given through analog input AI2, typically as a current signal in the
range of 0…20 mA (corresponding to 0…100% of rated motor torque).
The start/stop signal is connected to digital input DI1. The direction is determined by
DI2. Through digital input DI3, it is possible to select speed control (EXT1) instead of
torque control (EXT2). As with the PID control macro, speed control can be used for
commissioning the system and checking the motor direction.
It is also possible to change the control to local (control panel or PC tool) by pressing
the Loc/Rem key. By default, the local reference is speed; if a torque reference is
required, the value of parameter 19.16 Local control mode should be changed to
Torque.
A constant speed (by default, 300 rpm) can be activated through DI4. DI5 switches
between acceleration/deceleration time sets 1 and 2. The acceleration and
deceleration times, as well as ramp shapes, are defined by parameters
23.12…23.19.
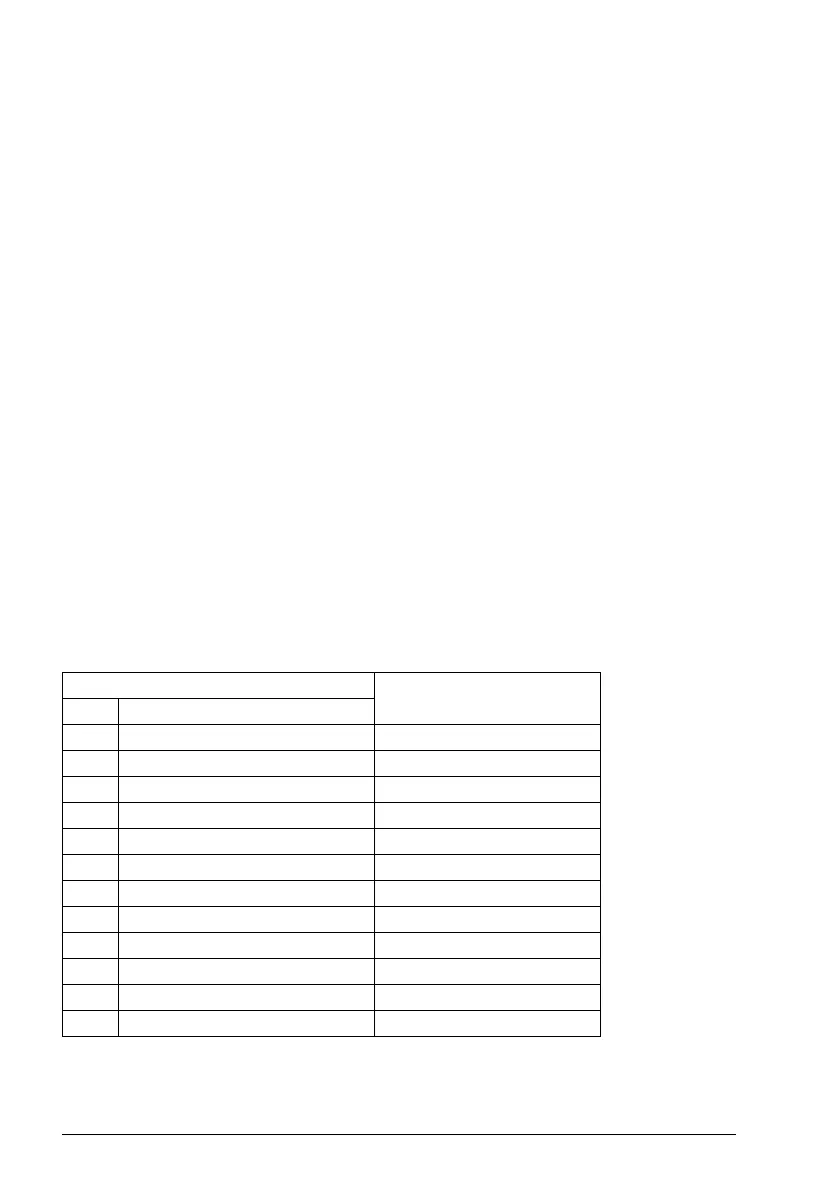
Default parameter settings for the Torque control macro
Below is a listing of default parameter values that differ from those listed for the
Factory macro in Parameter listing (page 152).
Parameter
Torque control macro
default
No. Name
19.11 Ext1/Ext2 selection DI3
19.14 Ext2 control mode Torque
20.02 Ext1 start trigger type Level
20.06 Ext2 commands In1 Start; In2 Dir
20.07 Ext2 start trigger type Level
20.08 Ext2 in1 source DI1
20.09 Ext2 in2 source DI2
20.12 Run enable 1 source DI6
22.22 Constant speed sel1 DI4
23.11 Ramp set selection DI5
26.11 Torque ref1 source AI2 scaled
31.11 Fault reset selection Not selected

 Loading...
Loading...











