348 Configuration
Note: The same SBC delay is used in the STO and SS1/SSE functions.
• delay for activating the brake after the SBC speed limit has been reached: 0 ms
(SS1.15 SS1-r ramp zero speed delay for STO = 0ms, not shown in the figure)
• when an encoder is used: zero speed limit to define the safety function as
completed: 90 rpm
(FSOGEN.52 Zero speed with encoder = 90 rpm, not shown in the figure)
• when an encoder is not used: delay to define the safety function as completed,
that is, estimated time in which the motor brakes to a stop from the maximum
speed: 1200 ms (SBC.13 SBC time to zero speed = 1200 ms)
• STO is activated if brake feedback fails (SBC.22 SBC feedback action = STO)
• brake feedback input connected to input
(SAFEIO.22 Safety relay 1 feedback = DI X113:2)
• feedback input type NC (inverted state compared with the brake relay)
(SAFEIO.23 Safety relay 1 feedback type = Mechanically linked NC contacts).
• See also section Configuring mute times on page 393.
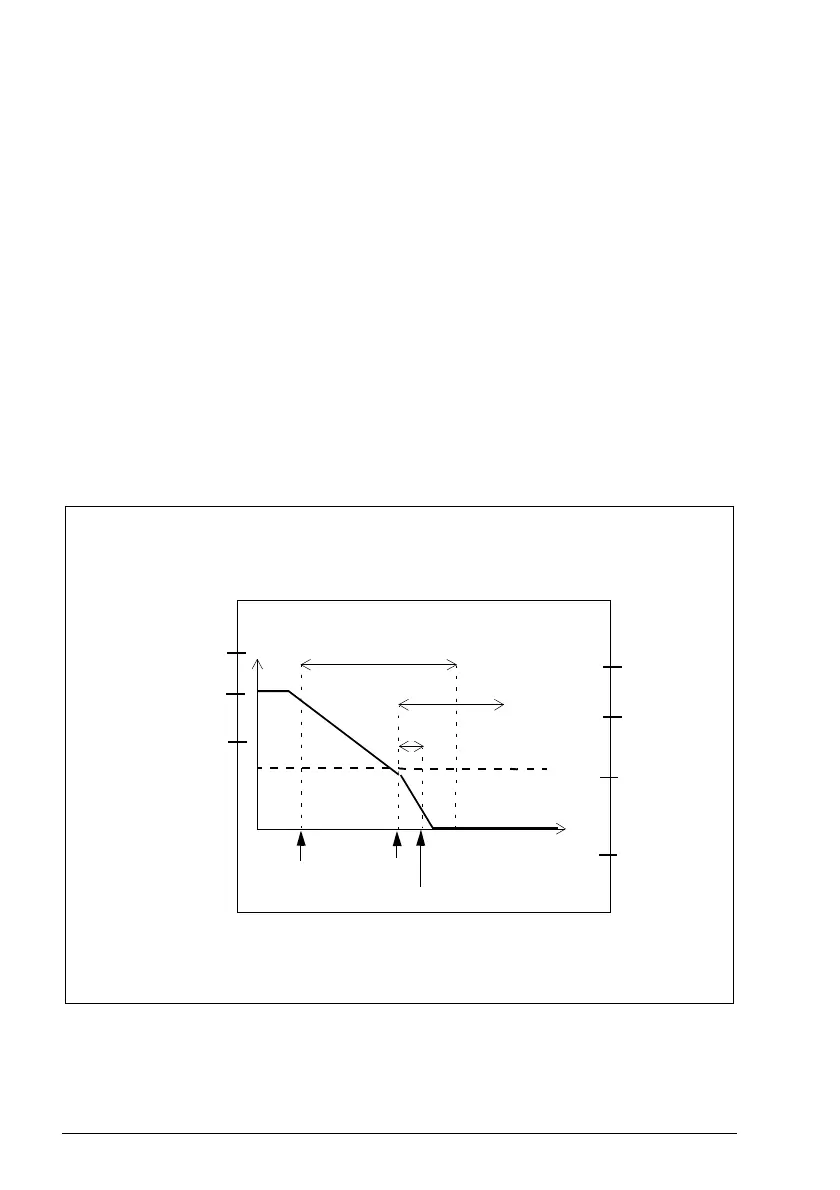
Note: This figure shows the case when an encoder is not used.
Remember to
configure SAR1!
Time
Speed
SBC activated
Inputs Outputs
SS1 activated
SS1.13 = SS1-t
SS1.01 = Version 1
STO.02 = Automatic
SS1.21
= DO X114:9
SS1.22
= None
SS1.11
= DI X113:1 & X114:1
SS1.12
= None
SBC.15
= 180 rpm
SBC.22 = STO
SAFEIO.23 = Mechanically linked NC contacts
SAFEIO.22
= DI X113:2
SBC.12 = -300 ms
SBC.21
= DO X113:7 &
X114:7
SAFEIO.53, SAFEIO.56 = On
SS1.14 = 2000 ms
STO activated
SBC.13 = 1200 ms
SAFEIO.21
= DO X113:7
& X114:7