www.balluff.com 7français
3
Structure et fonction (suite)
3.2 Fonction
Le BTL abrite le guide d'ondes, qui est protégé par un
tube en acier inoxydable. Un capteur de position se
déplace le long du guide d'ondes. Le capteur de position
est relié à l'élément de l'installation dont la position doit
être déterminée.
Le capteur de position définit la position à mesurer sur le
guide d'ondes.
Une impulsion initiale générée en externe déclenche, en
combinaison avec le champ magnétique du capteur de
position, une onde de torsion dans le guide d'ondes, qui
se forme par magnétostriction et se propage à vitesse
ultrasonique.
L'onde de torsion se propageant jusqu'à l'extrémité du
guide d'ondes est absorbée dans la zone
d'amortissement. L'onde de torsion au début du guide
d'ondes génère un signal électrique dans une bobine
réceptrice. Le temps de propagation de l’onde détermine
la position recherchée, qui est transmise par un signal dont
la forme varie suivant les modèles.
Fig. 3-2 :
BTL5-P1…
Start Stop
BTL5-I1…
Start Stop
BTL5-L1…
Tor
BTL5-M1…
Start Stop
BTL5-P1…
Start Stop
BTL5-I1…
Start Stop
BTL5-L1…
Tor
BTL5-M1…
Start Stop
Impulsions de sortie numériques
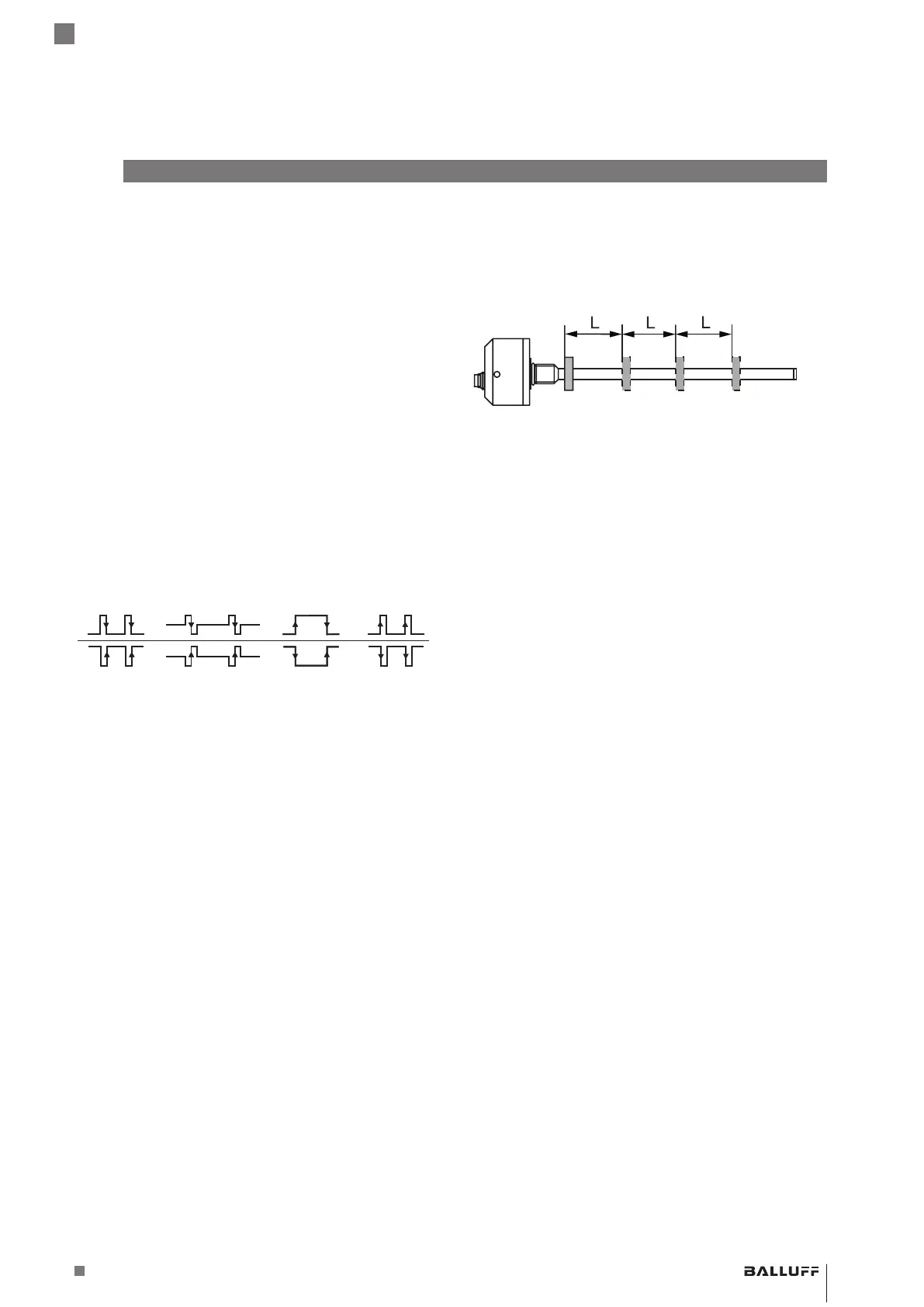
3.3 Nombre de capteurs de position
Jusqu’a 16capteurs de position peuvent etre utilises. La
distance minimale (L) entre les capteurs de position doit
etre de 65mm.
Fig. 3-3 : Distance entre les capteurs de position
BTL5-P/I/L/M1-M ____ -H/W(8) -S32/KA __ /K __
Système de mesure de position magnétostrictif – modèle à tige
 Loading...
Loading...







