www.balluff.com 7italiano
3
Struttura e funzionamento (continua)
3.2 Funzionamento
Nel BTL si trova la guida d’onda, protetta da un tubo in
acciaio inox. Lungo la guida d’onda viene spostato un
datore di posizione. Questo datore di posizione è collegato
al componente dell’impianto del quale deve essere
determinata la posizione.
Il datore di posizione definisce la posizione da misurare
sulla guida d’onda.
Un impulso INIT, generato esternamente, crea in unione
con il campo magnetico del datore di posizione un’onda
torsionale nella guida d’onda che si forma tramite
magnetostrizione e si propaga alla velocità ultrasonica.
La propagazione dell’onda torsionale verso l’estremità
finale della guida d’onda viene assorbita nella zona di
smorzamento. La propagazione dell’onda torsionale verso
l’estremità iniziale della guida d’onda genera un segnale
elettrico in una bobina di rilevamento. Dall’intervallo di
propagazione dell’onda viene determinata la posizione,
trasmessa come un’informazione digitale che, a seconda
della versione, può avere forma differente.
Fig. 3-2:
BTL5-P1…
Start Stop
BTL5-I1…
Start Stop
BTL5-L1…
Tor
BTL5-M1…
Start Stop
Impulso digitale in uscita
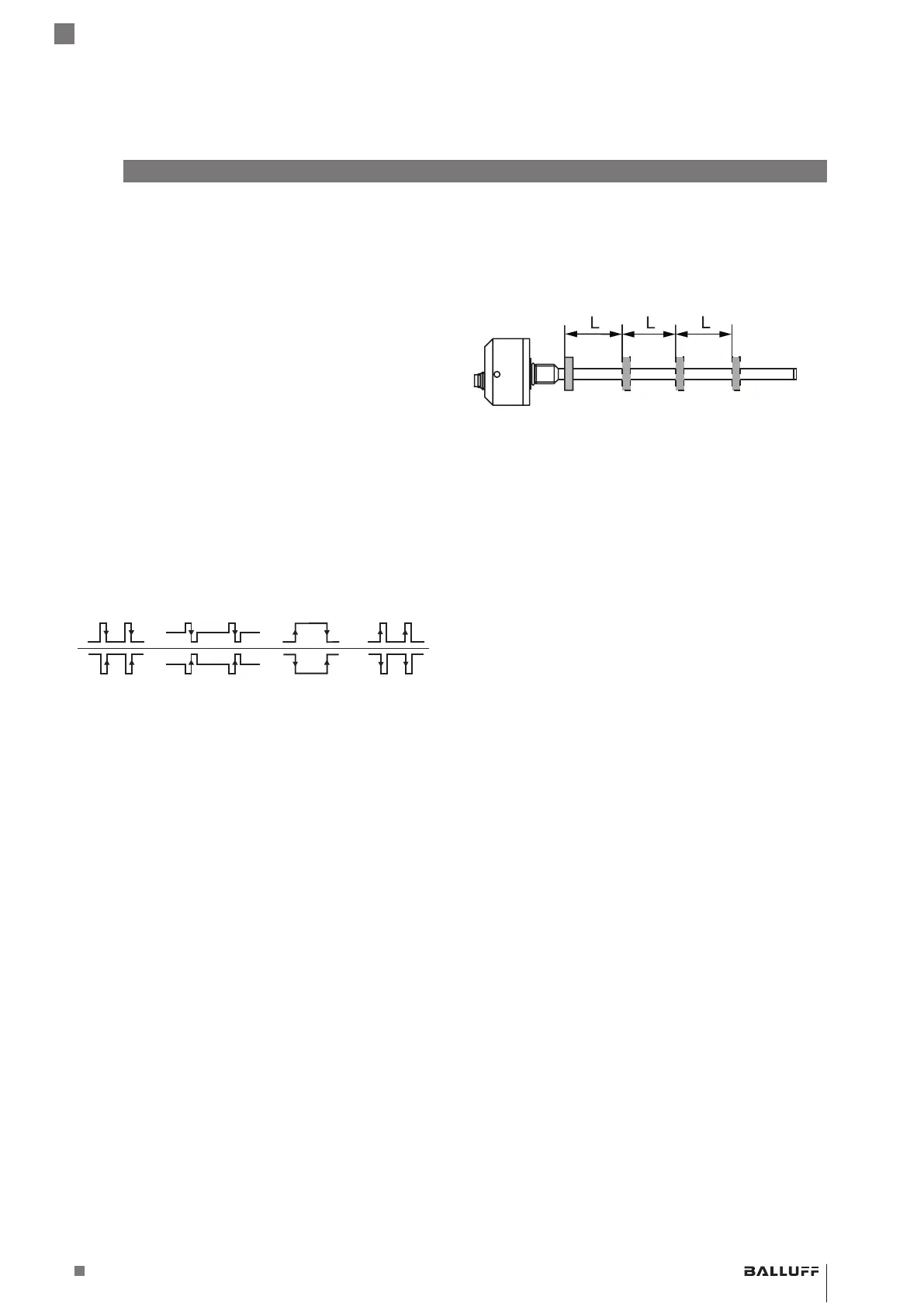
3.3 Numero datori di posizione
Si possono utilizzare fino a 16datori di posizione. La
distanza minima (L) tra i datori di posizione deve
corrispondere a 65mm.
Fig. 3-3: Distanza tra i datori di posizione
BTL5-P/I/L/M1-M ____ -H/W(8) -S32/KA __ /K __
Sensore di posizionamento lineare magnetostrittivo – versione a barra
 Loading...
Loading...







