Operating Instructions ACTIVE06/07 179
06/07 Operating Instructions ACTIVE 179
16.5.5 Field Controller
The flux-forming current component is controlled by the field controller. The guided
commissioning optimizes the parameters of the field controller by measuring the time
constant and magnetizing curve of the connected 3-phase machine. The parameters
of the field controller are selected such that they can be used without changes in most
applications. The proportional and the integrating part of the field controller are to be
set via parameters
Amplification 741 and Integral Time 742.
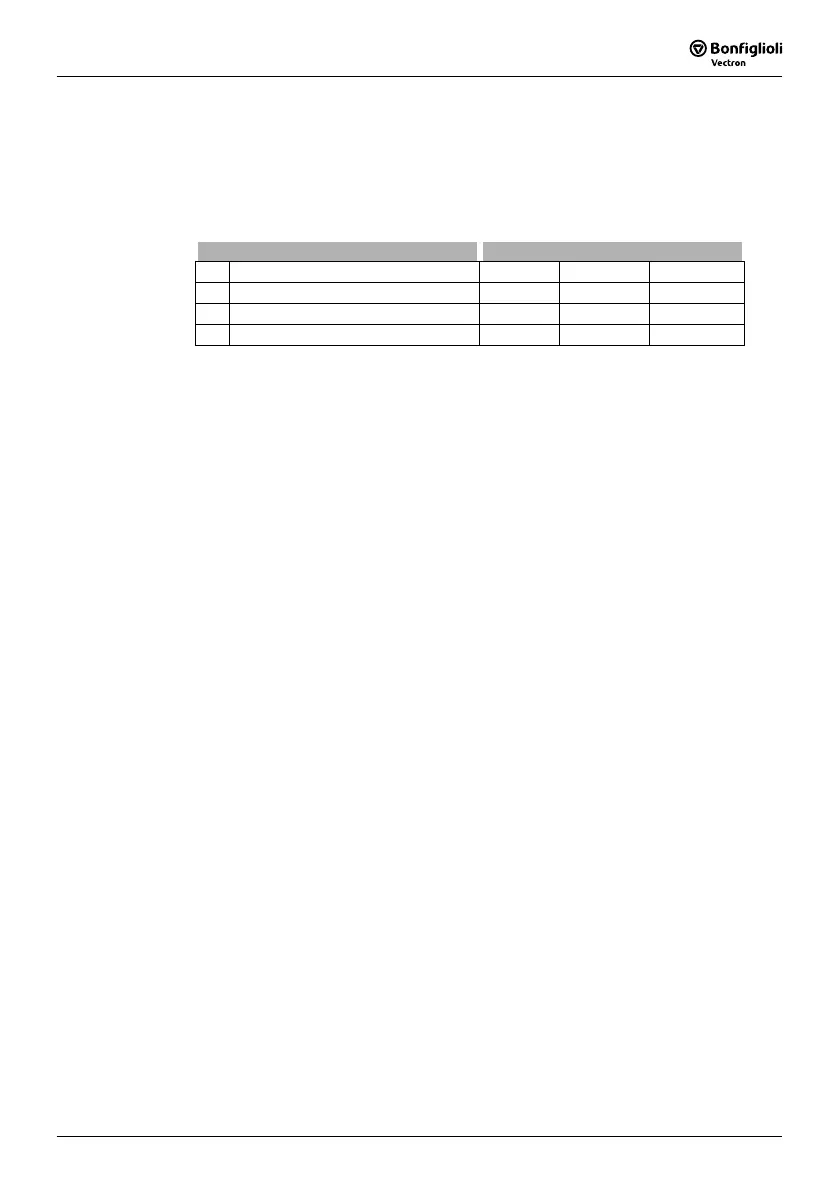
Parameter Settings
No. Description Min. Max. Fact. sett.
717 Reference Flux 0.01 % 300.00 % 100.00 %
741 Amplification 0.0 100.0 5.0
742 Integral Time 0.0 ms 1000.0 ms 100.0 ms
Optimization of the controller parameters of the field parameter should be done in the
basic speed range. The frequency to be set should be slightly lower than the limit of
the modulation controller selected via parameter
Reference Modulation 750 so that
the modulation controller is not active. Optimization of the
Reference Flux 717 is only
required in exceptional cases. The set percentage value changes the flux-forming
current component proportionally to the torque-forming current component. The cor-
rection of the rated magnetizing current by means of the reference flux thus changes
the torque of the drive. If the parameter
Reference Flux 717 is decreased drastically
(change-over from 100% to 50%), the parameter I
sd
can be oscillographed. The
course of the signal of the flux-forming current I
sd
should reach the stationary value
after overshooting without oscillation. The integral time of the field controller should
be selected according to the half rotor time constant calculated by the software. The
actual value to be read out via parameter
Act. Rotor Time Constant 227 divided by
two is to be used in the first approach for the parameter
Integral Time Field Control-
ler
742. If a quick transition into field weakening is necessary for the application, the
integral time should be reduced. The amplification is to be selected relatively large in
order to achieve a good dynamics of the controller. Attention should be paid to the
fact that an increased overshoot is necessary for a good control behavior in controlling
of a load with low-pass behavior, for example a 3-phase machine.
 Loading...
Loading...







