Brooks Automation 6. Service Procedures
Part Number: 603988 Rev. A Replacing the Gripper
Step Action
1.
Turn off the robot power and remove the AC power cord.
2.
Remove the Theta axis cover.
3.
Unplug the harness from the theta motor, encoder interface board and gripper controller.
4.
Disconnect the Echain from the theta/gripper mount plate by removing the (2) M3 X 6 mm
FHCS.
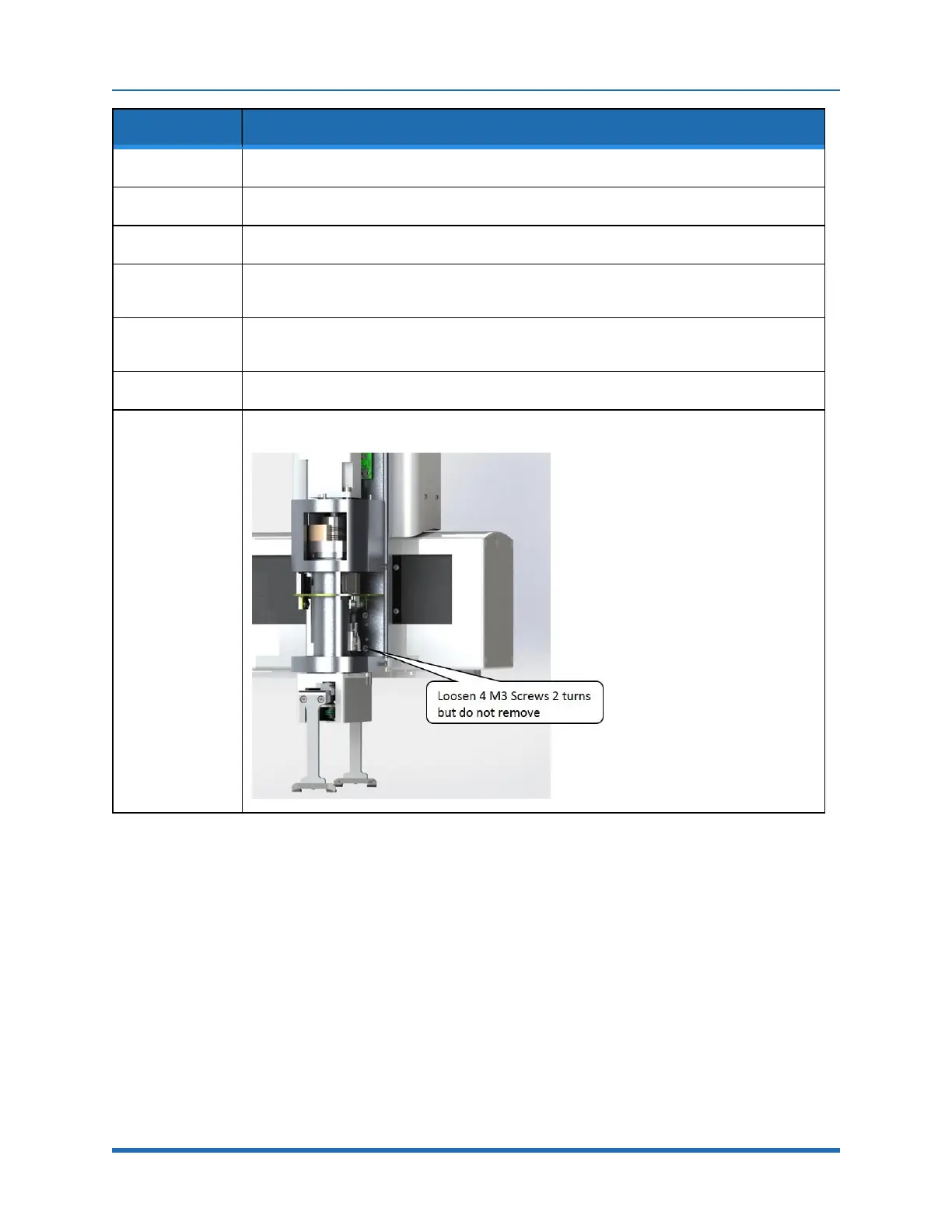
5.
Remove the entire Theta/Gripper assembly by loosening the (4) M3 X 10 mm SHCS 2 turns
and sliding the assembly up and out of the T slots in the Z-axis extrusion.
6.
Install a new assembly and re-assemble.
7.
Recalibrate the robot.
Copyright © 2023 Brooks Automation, Inc.
115