6. Service Procedures PreciseFlex 100 Robot
Recommended Tools Part Number: 603988 Rev. A
6. Service Procedures
Recommended Tools
The following tools are recommended for these service procedures:
l
Gates Sonic Belt Tension Meter, Model 507C for checking timing belt tension.
l
A set of metric “stubby” hex L-keys, for example McMaster Carr PN 6112A21 with 1.5, 2.0, 2.5, 3.0, 4, 5,
and 6 mm L Keys.
l
A set of metric hex drivers including 1.27, 1.5, 2.0, 2.5 and 3.0 mm driver, for example McMaster Carr PN
52975A21.
l
A pair of tweezers or needle nose pliers.
l
A pair of side angle cutters.
l
Small flat bladed screw driver, with 1.5 mm wide blade typical
l
M5 socket driver or M5 open end wrench or pliers
Troubleshooting
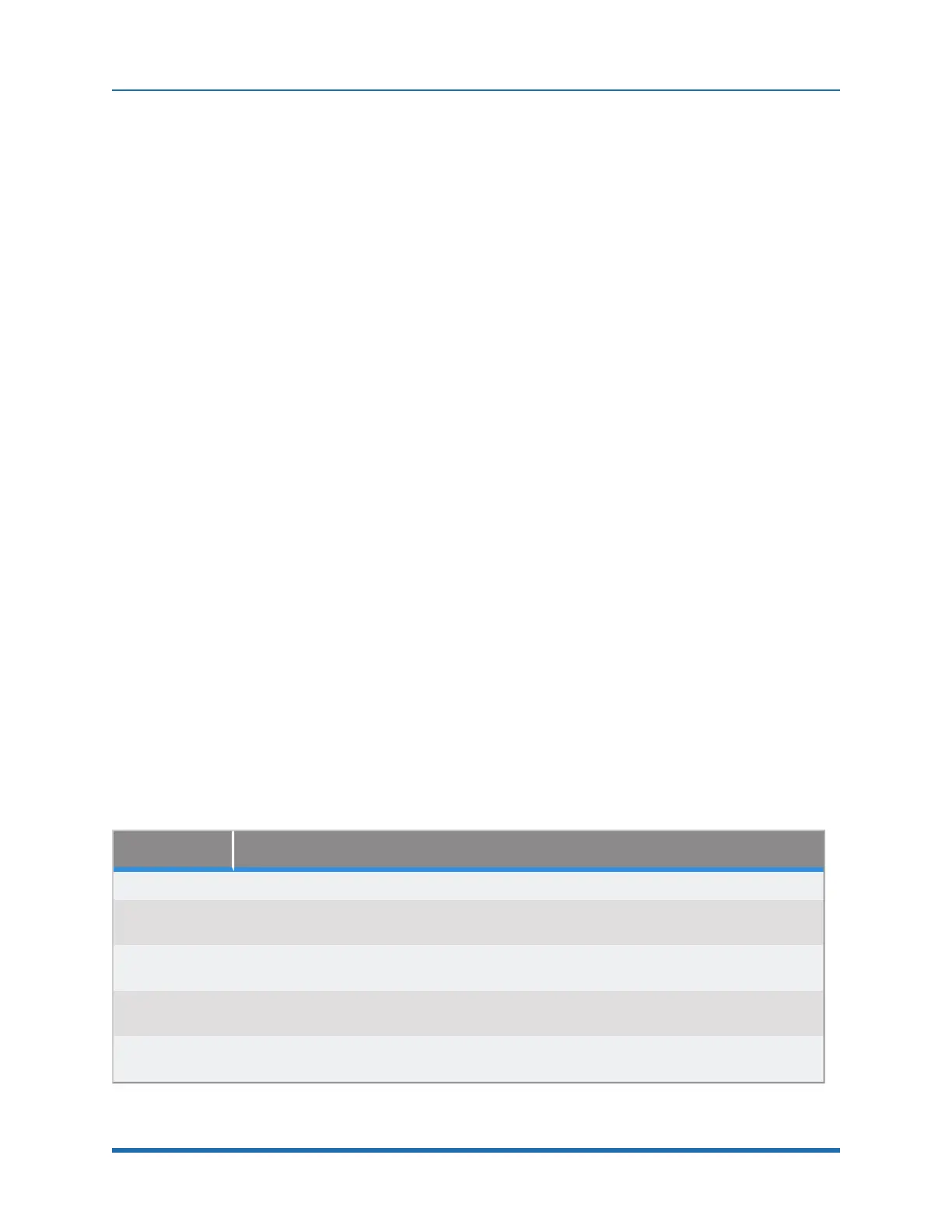
Precise robots and controllers have an extensive list of error messages. Please refer to the HTML
document PreciseFlex Library to search for a specific error message and cause. Listed in Table 6-1
are a few errors that may be generated by hardware failures.
Symptom Recommended Action
System error message generated
“ESTOP not
Enabled”
Check the 9-pin Dsub for the E-stop jumper.
“Encoder Battery
Low”
Replace the absolute encoder battery in the X-axis of robot.
“Encoder Battery
Down”
If the encoder cable has been disconnected, recalibrate the robot. If the battery voltage has
dropped below 2.5V, replace the encoder battery and recalibrate the robot.
“Encoder
Operation Error”
Joint rotated too quickly with power off. See "Encoder Operation Error" on page 84.
Table 6-1: Hardware Failure Errors
82
Copyright © 2023 Brooks Automation, Inc.