2. Introduction to the Hardware PreciseFlex 100 Robot
System Diagram and Coordinate Systems Part Number: 603988 Rev. A
System Diagram and Coordinate Systems
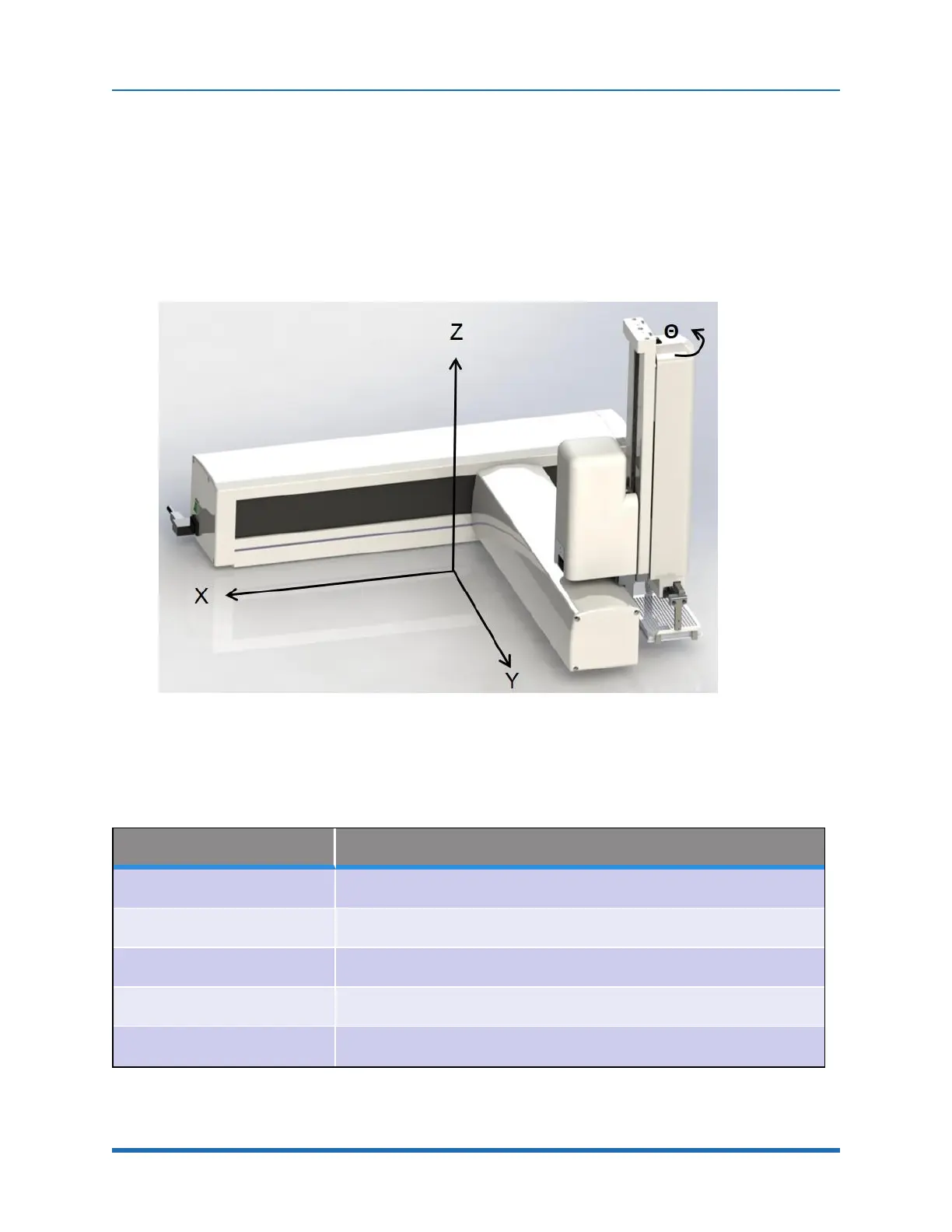
The PrecisePlace 100 robot is available in several configurations, including XZ, XZTheta,
XZTheta+Gripper, and XY, XYZ, XYZTheta, and XYZTheta+Gripper. The orientation and origin of
its World Cartesian coordinate system are shown in Figure 2-1 and defined in Table 2-1.
Figure 2-1: PrecisePlace 100 Orientation & Origin of Its World Cartesian Coordinate
System
Axis Description of Motion
X Varies with model
Y 0 or 350 mm
Z 229 mm XZ, or 260 mm XYZ
Theta +/- 270 degrees
Gripper 76 to 136 mm
Table 2-1: Axis & Description of Motion
20
Copyright © 2023 Brooks Automation, Inc.