4. Hardware Reference PreciseFlex 100 Robot
Robot Inputs and Outputs Part Number: 603988 Rev. A
MCP/E-Stop Interface
The MCP interface includes the signals necessary to connect a Manual Control Pendant, an E-Stop
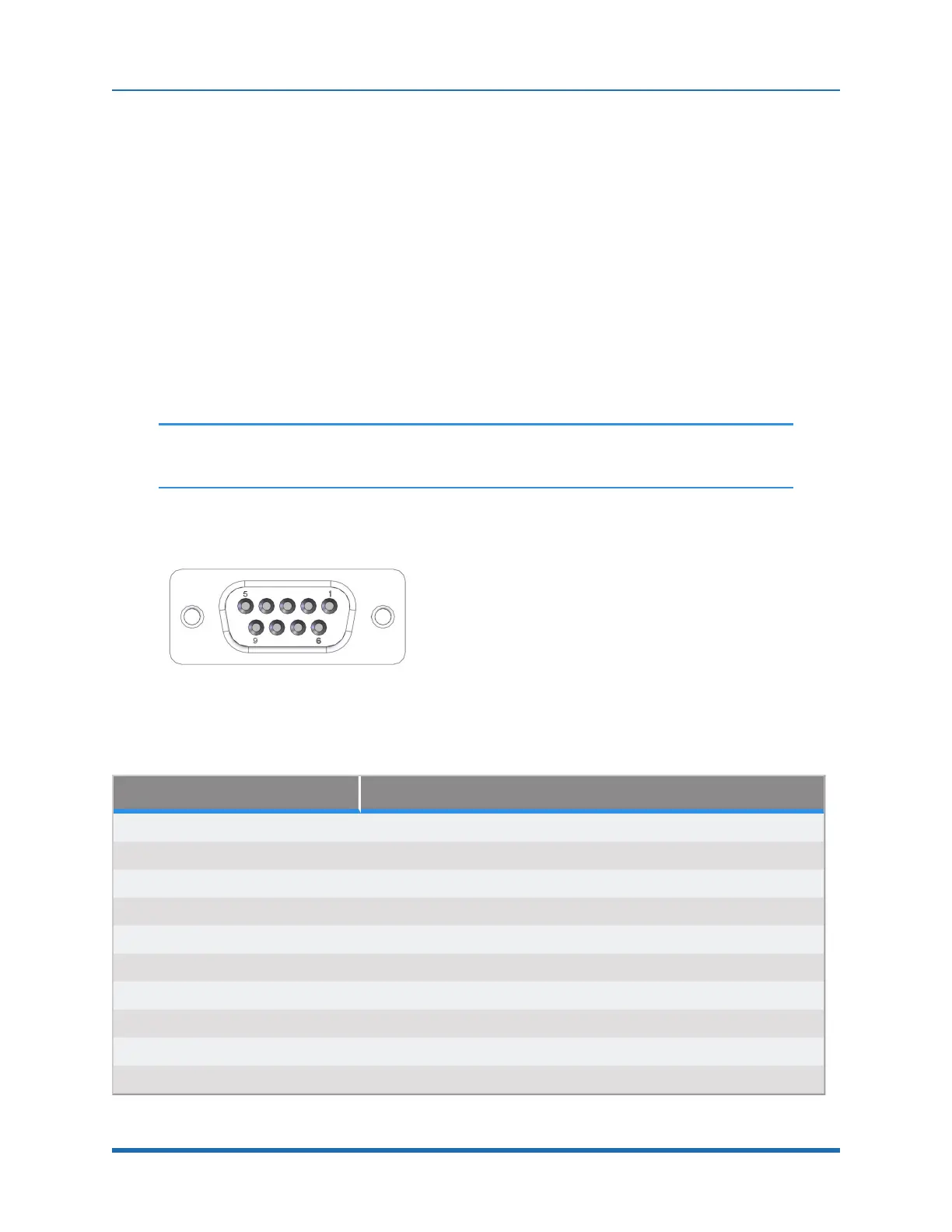
circuit, or an external RS485 Remote IO Module. These signals are provided in a DB9 female
connector (see Figure 4-14 and Table 4-1) mounted on the X-axis end cap.
In order for the robot to allow motor power to be enabled, the E-Stop circuit must connect 24VDC to
E-Stop1 in this connector. If no E-Stop box or circuit is connected, then the circuit must be
completed with jumper plugs. (The robot is shipped with a Dsub jumper plug that satisfies this
requirement.)
If a Manual Control Pendant is not connected to the secondary RS-232 port provided in this
connector, this serial interface can be accessed via a GPL procedure as device "/dev/com2" for
general communications purposes.
NOTE: Unlike the primary serial interface, this secondary serial interface does not
support flow control.
The RS485 port is used internally to communicate with the gripper controller and is also be used for
the Remote IO option. As such it has a dedicated protocol and is not available for general use.
Figure 4-14: DB9 Female Connector
Pin Description
1 24VDC
2 RS232 TXD
3 RS232 RXD
4 RS485-
5 Gnd
6 E-Stop1
7 E-Stop Daisy Chain
8 48VDC
9 RS485+
Interface Panel Connector Part No DB9 Female Connector AMP 5747150-7
Table 4-1: Pinout
62
Copyright © 2023 Brooks Automation, Inc.