48 Mentor ll User Guide
www.controltechniques.com Issue Number: 12
Set 04.13 = 1 to select. Operates in conjunction with 04.12 to configure
the Drive for speed control or any of three modes of torque control, as
follows:
04.12 =0and04.13 =0
Speed control mode (default configuration).
04.12 =1and04.13 =0
Basic current- or torque-control.
04.12 =0and04.13 =1
Torque-control mode with speed override.
04.12 =1and04.13 =1
Coiler/uncoiler control mode.
Speed mode control
The output of the speed loop becomes the current demand input into the
current loop.
Basic current - or torque - control mode
In this mode, the torque reference 04.08 is the input to the current loop
and is subject to the limitations of the over-riding current limit 04.03,the
Bridge 1 and Bridge 2 limits 04.05 and 04.06, and to the current slew rate
05.04.
Torque-control mode with speed override
RefertoFigure8-2andFigure8-3
In this mode, the output of the speed loop is clamped either to the value
of the torque reference 04.08, or to zero according to whether the speed
error 03.06 is positive or negative, and depending on whether the torque
reference is positive or negative, ie dependent on relative polarities.
In the two motoring quadrants, speed is limited to the value of the final
speed demand 03.01, preventing uncontrolled increase of speed when
load is removed. The Drive should be adjusted to run at a slight
overspeed when off load, in order to ensure adequate current demand at
all speeds.
In the two regenerative quadrants, the current demand set by torque
reference 04.08 is disabled when speed is less than that set by the final
speed demand 03.01. This prevents the reducing load torque resulting in
reversal of rotation. The value of 03.01 should be zero.
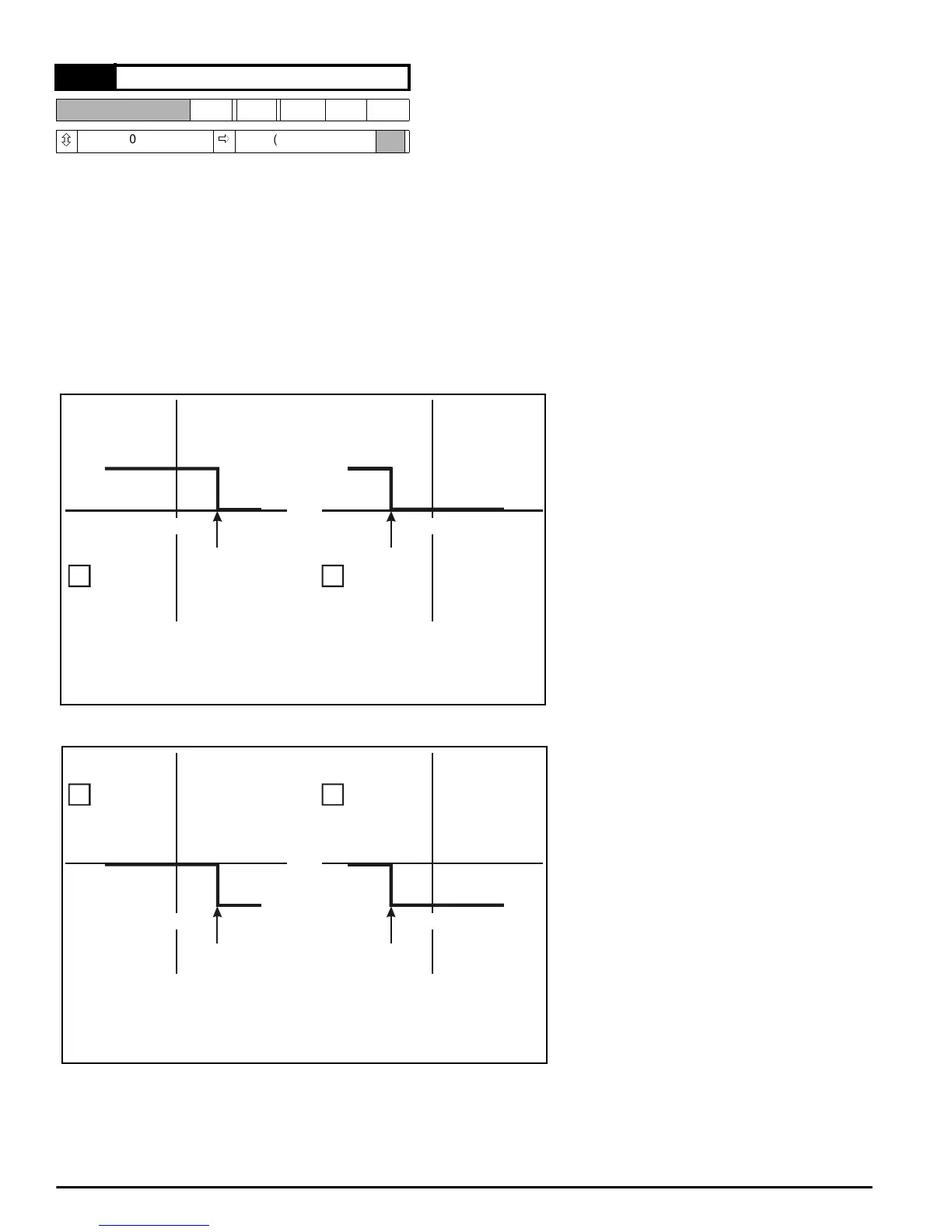
Figure 8-2 Torque control with speed over-ride. Positive torque
reference
Figure 8-3 Torque control with speed over-ride. Negative torque
reference
A disadvantage of this mode is that it cannot provide torque at a particular
speed both accelerating and decelerating. Parameter 04.08 behaves as
a controllable current limit in this mode.
04.13 Mode bit 1
RW Bit
ô
0or1
ð
0 (not selected)
MM
nn
04.08 04.08
03.06 +ve 03.06 -ve03.06 -ve 03.06 +ve
03.01 03.01
b
aQ1-Forwarddrive.
b Q2 - Reverse braking.
Positive torque, forward drive and reverse braking, are applied
at the value of 03.01 when the speed error 03.06 is positive.
When the speed error is negative, torque is zero.
a
MM
nn
04.08 04.08
03.06 +ve 03.06 -ve
03.01
03.06 -ve03.06 +ve
03.01
b
aQ4-Forwarddrive.
b Q3 - Reverse braking.
Negative torque, forward braking and reverse drive, are applied
at the value of 03.01 when the speed error 03.06 is negative.
When the speed error is positive, torque is zero.
a