Chapter 7 Servo Parameters ASDA-B2
7-4 Revision September 2013
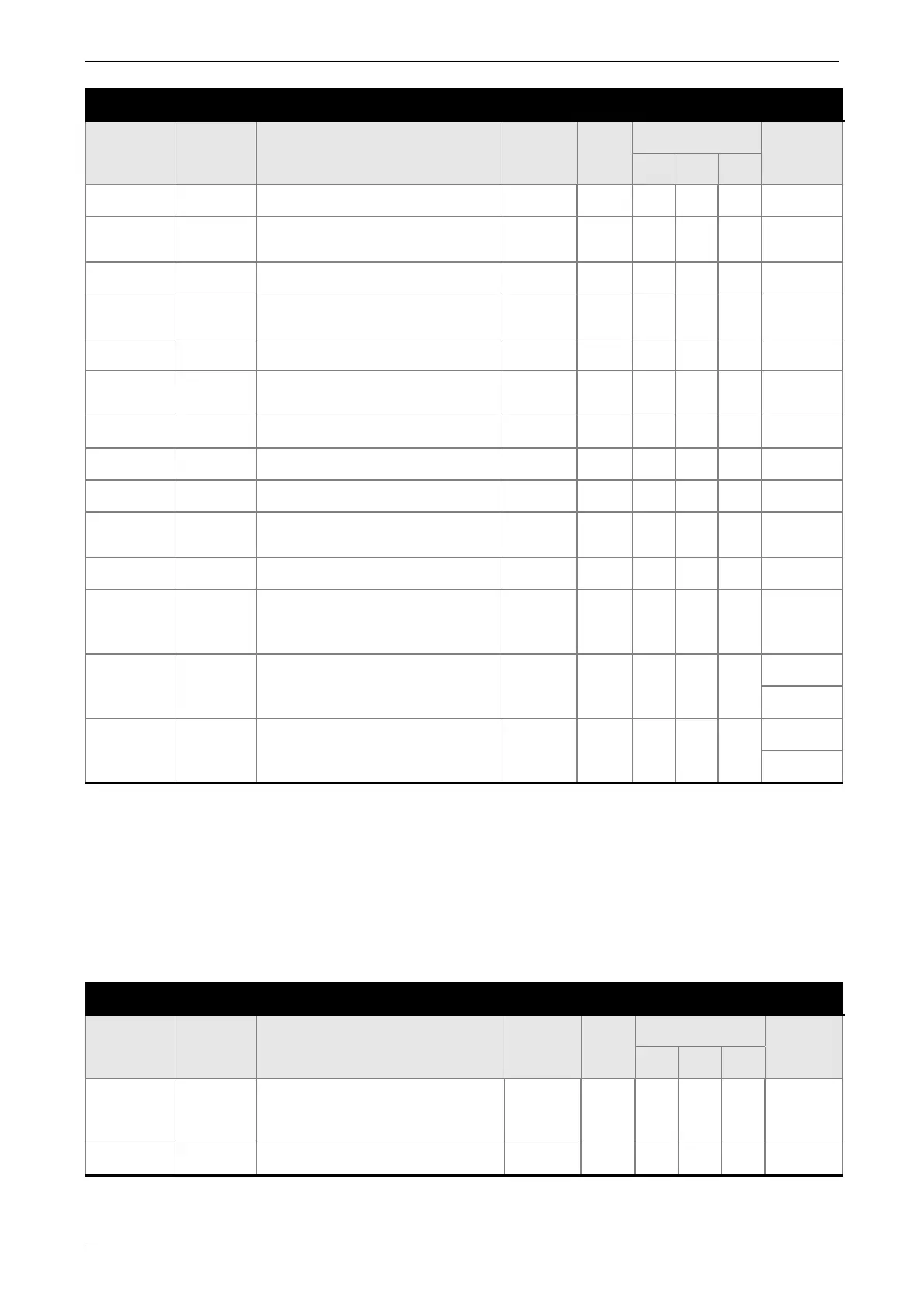
Gain and Switch
Parameter Name Function Default Unit
Control Mode
Related
Section
PT S T
P2-00 KPP Proportional Position Loop Gain 35 rad/s O 6.2.5
P2-01 PPR
Position Loop Gain Switching
Rate
100 % O 6.2.5
P2-02 PFG Position Feed Forward Gain 50 % O 6.2.5
P2-03 PFF
Smooth Constant of Position
Feed Forward Gain
5 ms O -
P2-04 KVP Proportional Speed Loop Gain 500 rad/s O O O 6.3.6
P2-05 SPR
Speed Loop Gain Switching
Rate
100 % O O O -
P2-06 KVI Speed Integral Compensation 100 rad/s O O O 6.3.6
P2-07 KVF Speed Feed Forward Gain 0 % O O O 6.3.6
P2-26 DST External Anti-interference Gain 0 0.001 O O O -
P2-27 GCC
Gain Switching Control
Selection
0 N/A O O O -
P2-28 GUT Gain Switching Time Constant 10 10ms O O O -
P2-29 GPE Gain Switching Condition 1280000
pulse
Kpps
r/min
O O O -
P2-31 AUT1
Speed Frequency Response
Level in Auto and Semi-Auto
Mode
80 Hz O O O
5.6
6.3.6
P2-32▲ AUT2 Tuning Mode Selection 0 N/A O O O
5.6
6.3.6
Explanation of symbols (marked after parameter)
(★) Read-only register.
(▲) Parameter cannot be set when Servo On (when the servo drive is enabled).
() Parameter is effective only after the servo drive is restarted (after switching power off and
on).
() Parameter setting values are not retained when power is off.
Position Control
Parameter Name Function Default Unit
Control Mode
Related
Section
PT S T
P1-01 CTL
Control Mode and Output
Direction
0
pulse
r/min
N-M
O O O 6.1
P1-02▲ PSTL Speed and Torque Limit 0 N/A O O O 6.6
VARITEL INGENIERIA ELECTRONICA S.A.
info@varitel.com - www.varitel.com - Tel. (54) 11-4243-1171 / Fax: (54) 11-4292-7545
Manuel Baliña 456, Lomas de Zamora (B1832CCJ) Buenos Aires, Argentina.