ADV100 • Functions description and parameters list 129
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
11040 Waitspeed rpm FLOAT 0.00 0.00 CALCI RW FVS
This parameter denes the output speed threshold below which the PID enters the waiting condition (PID state =
Wait).
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
11042 Checkwaittime sec FLOAT 0.00 0.00 100000 RW FVS
This parameter denes the time for detecting the waiting and restart condition.
The PID moves to the waiting condition if the output speed remains below the threshold set in parameter 11040 Wait
speedfor longer than the time set in this parameter.
The drive moves back to the PID condition if the PID output exceeds the threshold set in parameter 11044 Restart
speed for longer than the time set in parameter 11042 Checkwaittime.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
11044 Restartspeed rpm FLOAT 0.00 0.00 CALCI RW FVS
This parameter denes the speed threshold above which the PID moves out of the waiting condition.
When the actual output speed is lower than or equal to that set in parameter 11040 Waitspeedfor longer than the
time set in 11042 Checkwaittime, the drive moves to the waiting condition.
When the speed command is higher than the value set in Restartspeedfor longer than the time set in Checkwait
time, the drive restarts.
When the drive is in the waiting condition, the speed command is still calculated by the PID. When the calculated
speed reaches the restart speed, the drive accelerates from the minimum speed following the set ramps.
The restart speed must be higher than the waiting speed.
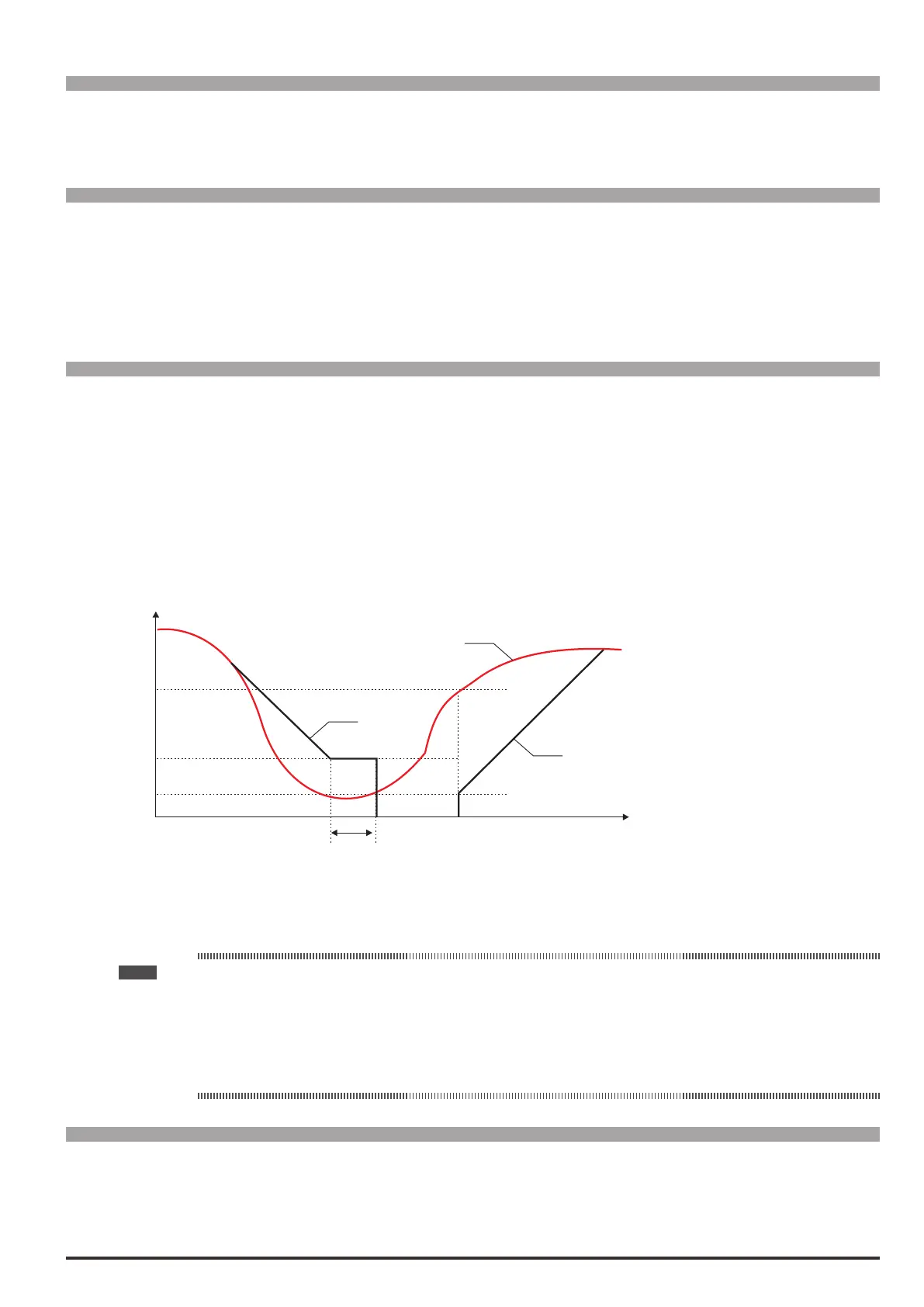
Frequency
Time
11044
11040
636
(1)
(2)
(4)
(3)
(1)Decelerationtimelimit
(2)FrequencycalculatedbythePID
(3)Outputfrequency
(4)Accelerationtimelimit
Note: If the waiting speed is equal to zero the function is disabled.
When the output speed is lower than or equal to the waiting speed and the time is longer than the detection time, the
waiting condition is enabled and the output speed is equal to 0.
When the output speed is lower than or equal to the waiting speed for less than the detection time, the speed command
= waiting speed.
If the minimum speed is lower than the waiting speed, the waiting condition cannot be enabled.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
11070 Constpressurethr % INT32 0 0 100 RW FVS
This parameter denes the error threshold (expressed as a percentage with respect to the set point) for moving to
the constant pressure condition.
When the error is below the set threshold, the PID moves to the “Constant pressure” condition and the drive stops.