128 ADV100 • Functions description and parameters list
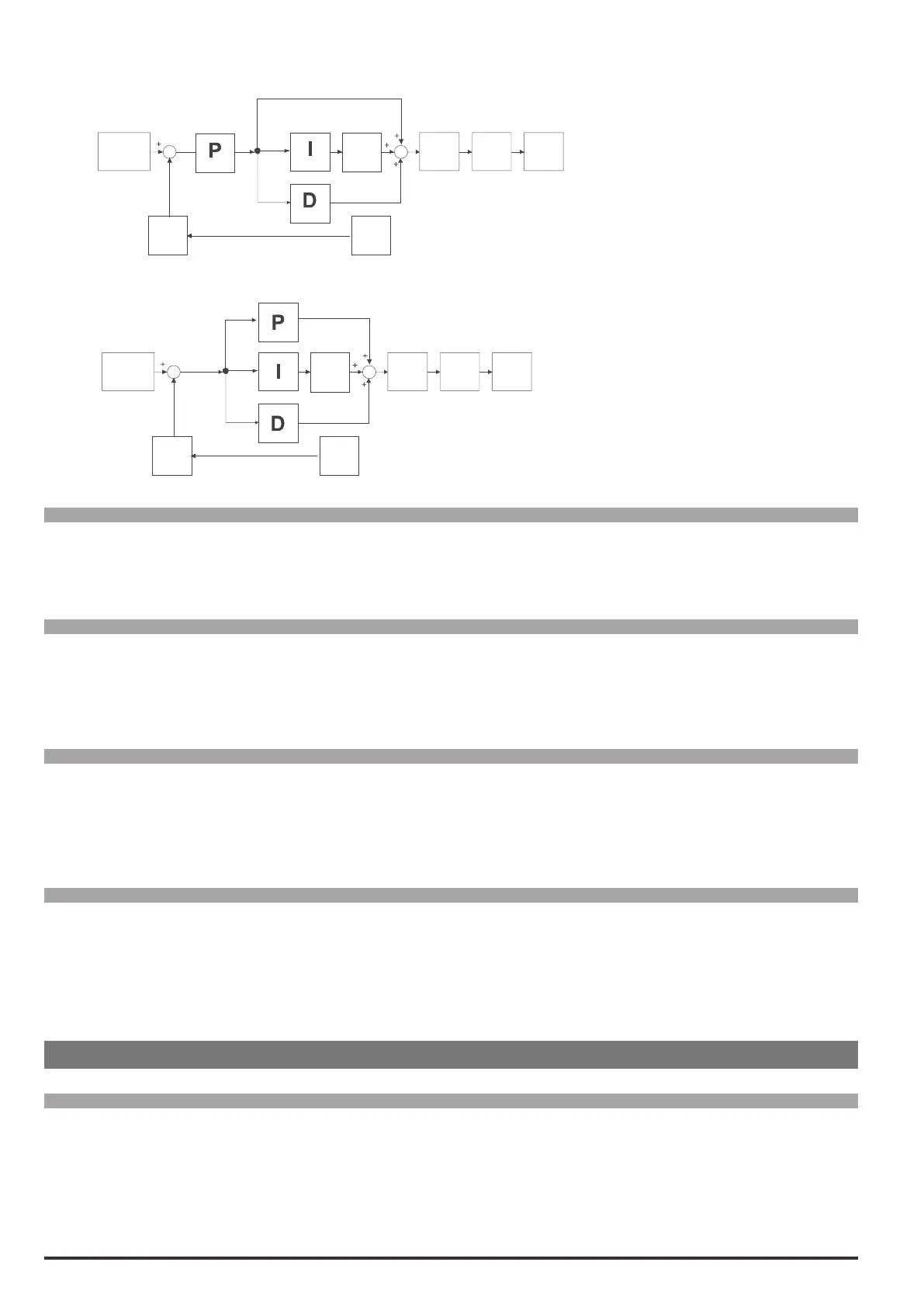
Serial mode
Setpoint
Input Freq
Gain
Integral
gain
limit
PID
feedback
Output
freq.
limit
Digital
filter
Freq.
Command
PAR 11002
PAR 11032
PAR 11020
PAR 11022
PAR 11028PAR 11030
PAR 11024
PAR 11034
PAR 11006
Parallel mode
Setpoint
Input Freq
Gain
Integral
gain
limit
PID
feedback
Output
freq.
limit
Digital
filter
Freq.
Command
PAR 11002
PAR 11032
PAR 11020
PAR 11022
PAR 11028PAR 11030
PAR 11024
PAR 11034
PAR 11006
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
11028 Outputfiltertime sec FLOAT 0.000 0.000 2.500 RW FVS
This parameter denes the time constant of the digital lter inserted before the PID output. The lter is inserted to
prevent any amplication of measurement noise in the controller output and helps to mitigate any oscillations.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
11030 Limitgain % FLOAT 100.0 0.0 110.0 RW FVS
This parameter denes the percentage of the output speed limit during PID control. The formula is: output speed
limit = Full scale speed multiplied by parameter 11030 Limitgain (%). This parameter may limit the maximum output
speed.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
11032 Limitintegralgain % FLOAT 100.0 0.0 100.0 RW FVS
This parameter denes the upper limit for integral gain (I) and thus limits the output speed.
The formula is: upper integral limit = Fullscalespeed multiplied by parameter 11032 LimIntegralgain(%).
This parameter may limit the maximum output speed.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
11034 Gainfeedback FLOAT 1.0 0.0 10.0 RW FVS
This parameter denes the gain on the feedback detection value.
The feedback value is that of the source selected in parameter 11004 Feedbacksel multiplied by parameter 11034
Gainfeedback.
LEVELS
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
11038 Minimunspeed rpm INT32 0 0 CALCI RW FVS
This parameter denes the minimum PID output speed.
The offset derived from the minimum PID speed is set before calculating the maximum speed limit so that the output
cannot exceed the maximum speed limit even in case of a high minimum speed.
To avoid any inconsistency between the minimum speed set in this parameter and that set in parameter 636 Ramp
refbottomlimthese parameters are always the same.