ADV100 • Functions description and parameters list 89
Condition Frequency value
First enabling of the drive after power-on Par 3364Vfcatchstartfreq
Drive enabled and demagnetising for a time > Par 3376Vfcatchlastrefdly Par 3364Vfcatchstartfreq
Drive enabled and demagnetising for a time < Par 3376Vfcatchlastrefdly Last frequency before disabling the drive
Automatic restart after an alarm Last frequency before the alarm occurred
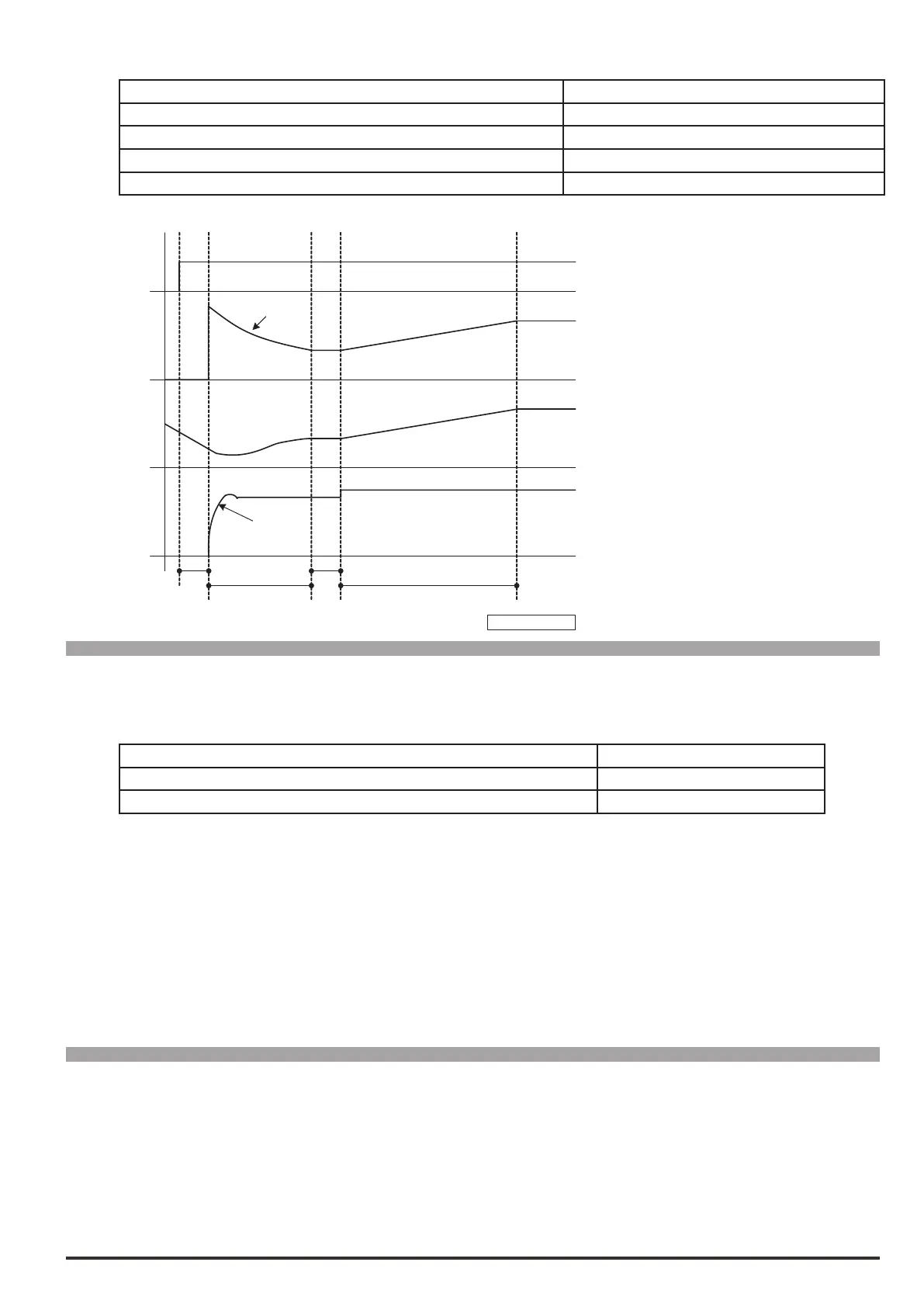
SpeedCapture_01.vsd
OutFreq
MotorSpd
OutCurr
Speed search
Par 3366
Waiting for demagnetiz
Acceleration
Magnetiz
Par 3368
Search time
Par 3370 P gain
Par 3372 I gain
Vf control
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.5.2 3364 Vfcatchstartfreq Hz FLOAT 50.0 -500.0 500.0 ERWZ V
This parameter is used to congure the frequency at which the procedure to capture a motor that is running starts.
This parameter is used if:
Condition Frequency value
First enabling of the drive after power-on Par 3364Vfcatchstartfreq
Drive enabled and demagnetising for a time > Par 3376Vfcatchlastrefdly Par 3364Vfcatchstartfreq
This parameter must be set to a frequency that is higher than the frequency at which the motor is running at the
beginning of the capture procedure. If the conditions are not always identical the maximum frequency or a few Hz
below this must be set. The reference sign setting must be the same as the sign of the frequency at which the motor
is running.
If a frequency value close to the actual frequency is set, the capture time is short. If there is a big difference between
the frequency value setting and the actual frequency, the capture time is longer.
The recommended setting for this parameter is 0 if the function is enabled for use to capture a motor running due to a
temporary disabling of the drive or to capture a motor running in the case of an automatic restart after an alarm; or in
case of enabling after power-on or after prolonged periods of disabling, the motor speed is certainly 0.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.5.3 3366 Vfcatchenabledly ms UINT16 1000 10 10000 ERWZ V
This parameter is used to congure the time to wait for demagnetisation of the motor before executing the procedure
to capture the motor that is running. The waiting time for demagnetisation is measured starting from the moment the
drive detects that the conditions are OK to execute the capture procedure. This parameter is useful for automatic
restarts after an alarm.
If the motor ux is not zero when the enable command is sent the drive might generate the Overcurrent alarm.
The value to set depends on the size of the motor. Large motors have a high rotor time constant and therefore re-
quire a long demagnetisation time. Setting a higher value than necessary is not a problem.