Mouseboat manoeuvring controller
Only available in twin jet vessels.
If there is no Mouseboat manoeuvring controller, click
skip to continue.
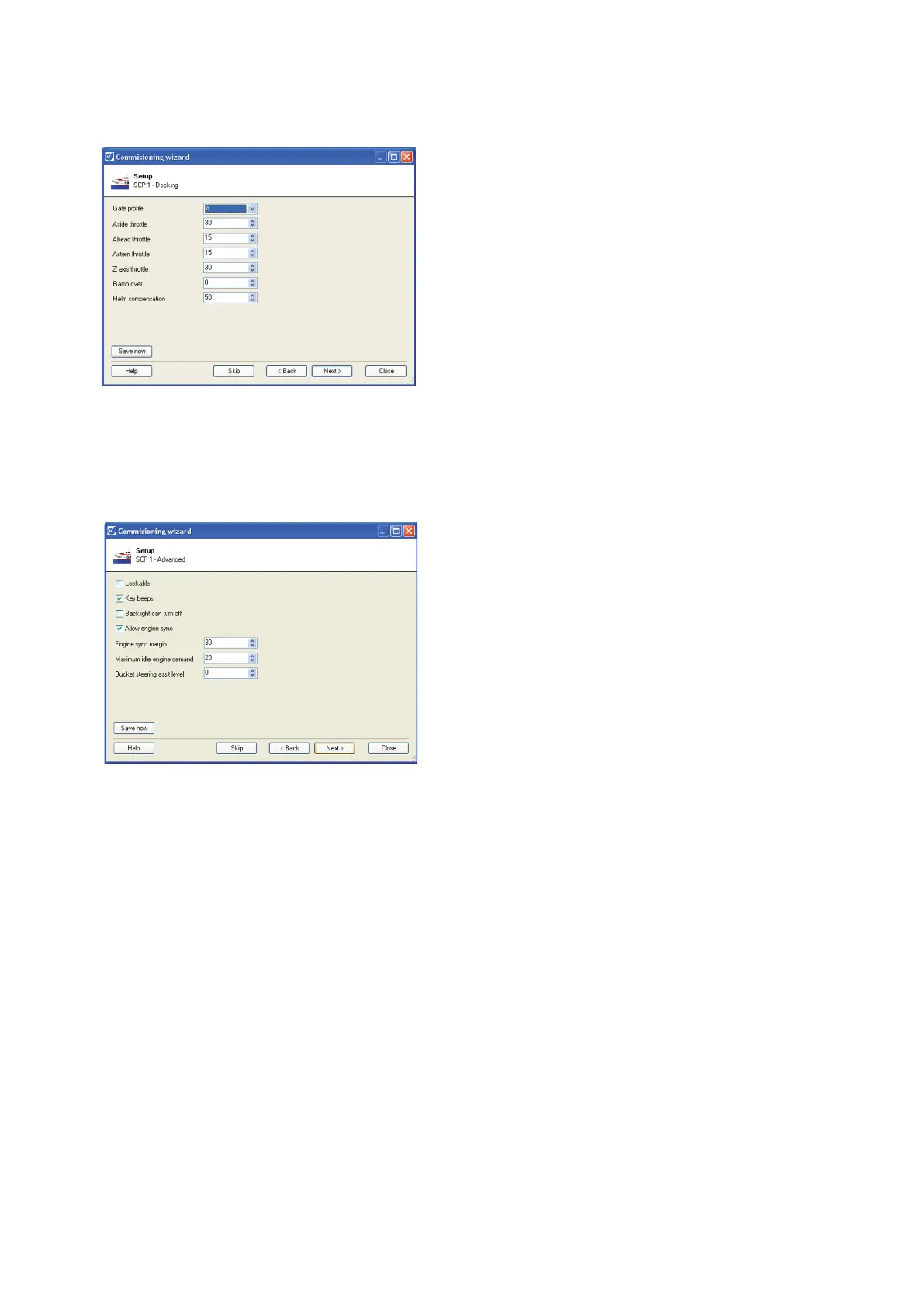
If there is a Mouseboat manoeuvring controller, set the
following:
Gate profile
Aside throttle.
Ahead throttle.
Astern throttle.
Z axis throttle.
Ramp over.
Helm compensation. Can be reconfigured once the
vessel is on the water.
Click Next to save the settings and continue.
Autopilot at this station
If there is no autopilot, click
to continue.
If there is an autopilot, set the following:
Autopilot type.
Slew rate.
Port demand.
Starboard demand.
Mid demand.
Port feedback.
Starboard feedback.
Mid feedback.
Click Next to save the settings and continue.
 Loading...
Loading...