JETanchor control module set up
If the control system includes a JETanchor control module (JACM), follow these steps to set it up:
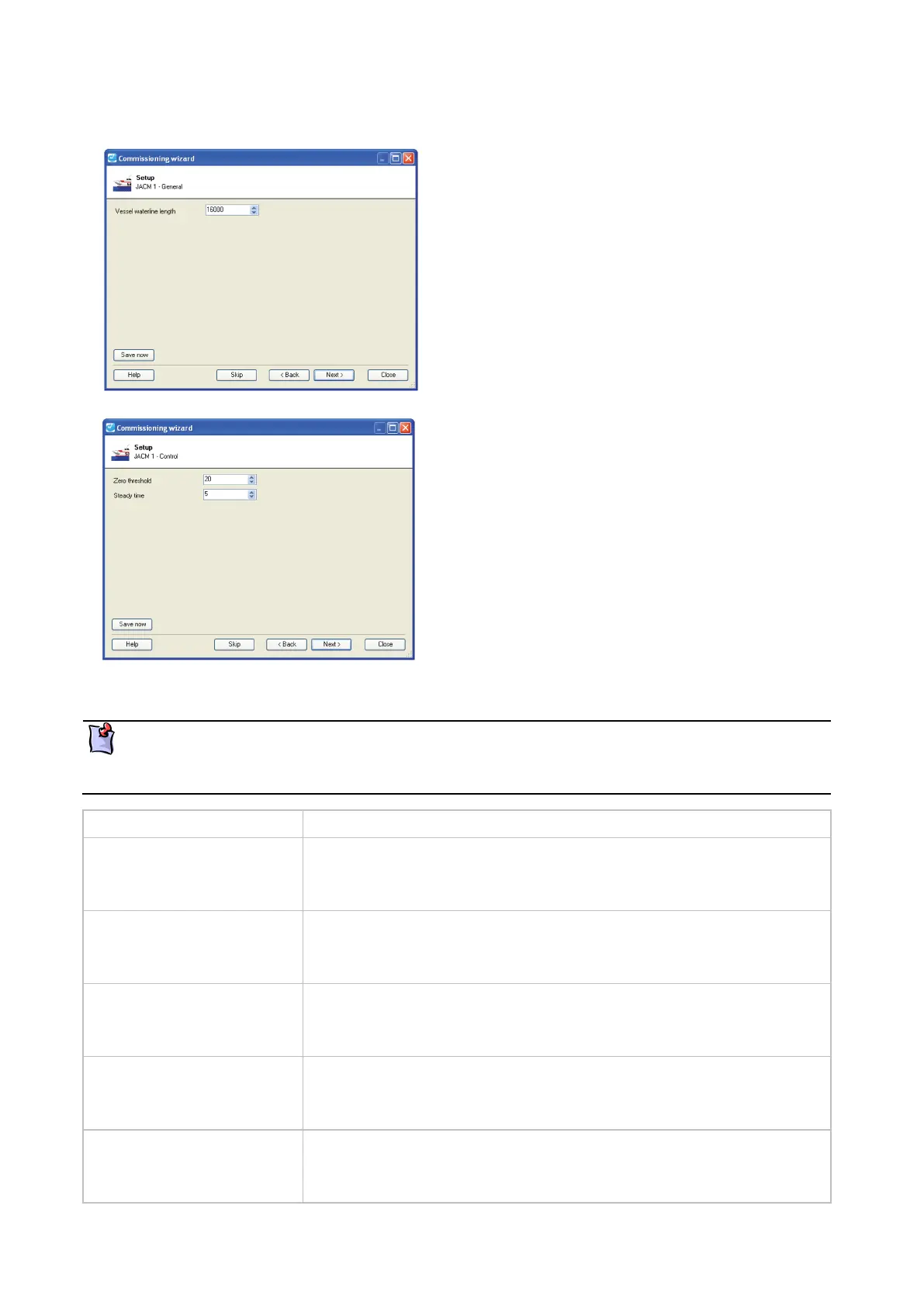
Set the vessel waterline length. This is the vessel's
length at waterline in mm.
Click Next to save the setting and continue.
Set the JETanchor zero threshold and steady time. Use
of the default values is recommended.
Click Next to save the settings and continue.
Set the following JETanchor alarm setpoints:
We recommend that the default alarm setpoint values be used. The default values are suitable for
most vessels in most circumstances. Consult staff at HamiltonJet before changing the default
values.
Alarm setpoint Description
Off target alarm radius Distance the vessel can be off the set target point before causing an
alarm. An audible alert briefly sounds as a warning when the vessel is 50%
off the set target point.
Off heading alarm radius Degrees the vessel can be off the set target heading before causing an
alarm. An audible alert briefly sounds as a warning when the vessel is 50%
off the set heading.
Effort alarm timeout Time that JETanchor can continuously demand maximum thrust before
causing an alarm. An audible alert briefly sounds as a warning when
maximum thrust is demanded continuously for 50% of the set time.
GPS position jump alarm Distance the reported longitude or latitude GPS position can jump before
causing an alarm. An alarm is generated and station keeping and virtual
anchor modes disengage, returning control to mouseboat manual mode.
GPS heading jump alarm Degrees the reported GPS heading can jump before causing an alarm. An
alarm is generated and station keeping and virtual anchor modes
disengage, returning control to mouseboat manual mode.
 Loading...
Loading...