Autotune test: Sensor orientation
Test name
Purpose Confirms that GPS and IMU sensors are correctly orientated
Prerequisites The blue ARROW system has been commissioned and is alarm free
JETanchor system is installed
JETanchor Mouseboat is in control
0. Calibrations Port and 1. Calibrations Starboard tests have been
successfully completed
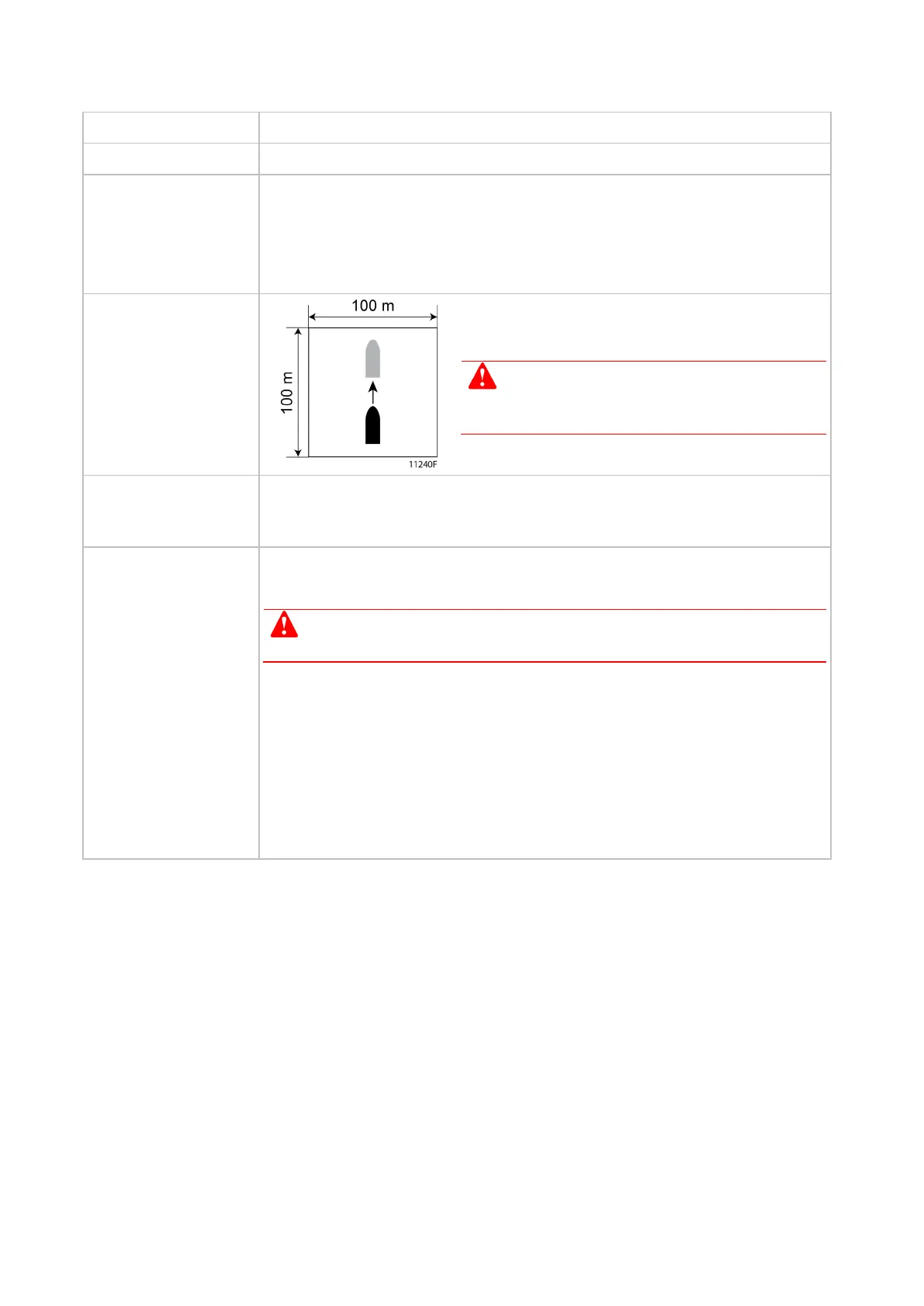
Required test area
The vessel may move within a zone 100 metres
wide and 100 metres long
The vessel must be in calm water away from
other water users and hazards such as fixed
objects
Expected system
behaviour
The vessel automatically moves ahead for 10 seconds at maximum
JETanchor surge thrust
Approximate test time for a medium-size (twin HJ364) vessel: 10 seconds
Test procedure Before starting the test, confirm with the vessel master that it is safe to take
control
The vessel master can abort an auto tune test and take manual control
of the vessel at any time, by moving the Mouseboat
Orientate the vessel either head-on or stern-
on to any wind or current that is
present
Select test 2. Sensor Orientation test, then click Next when you are ready to
start the test
Monitor vessel behaviour at all times during the test and abort the test if
unexpected behaviour occurs
Inform the vessel master when the test is complete and confirm who has
vessel control
 Loading...
Loading...