Chapter 5 VARIOUS FUNCTIONS
1
5.18.3 VRM UNIT
Set the VRM unit.
The unit can be selected from following.
NM/km/sm/Link Range
When "Link Range" is selected, it is linked to the unit of the observation range. (Refer to “Range” in “8.8.6
UNIT”)
5.18.4 CURSOR MODE
This function enables the setting of detail information about cursor display.
Set the bearing mode, length, unit and pattern of cursor.
Set the bearing mode of cursor (“Bearing Mode”). Bearing mode is selected “True” or “Relative.”
When “True” is selected, true bearing of cursor is displayed.
When “Relative” is selected, the relative angle of the own ship's heading bearing is displayed as the bearing
of cursor.
Set the distance unit for cursor (“Unit”).
Unit is selected from “NM”, “km”, “sm” and “Link Range.”
Set the length of the cross-cursor mark on the radar display (“Size”).
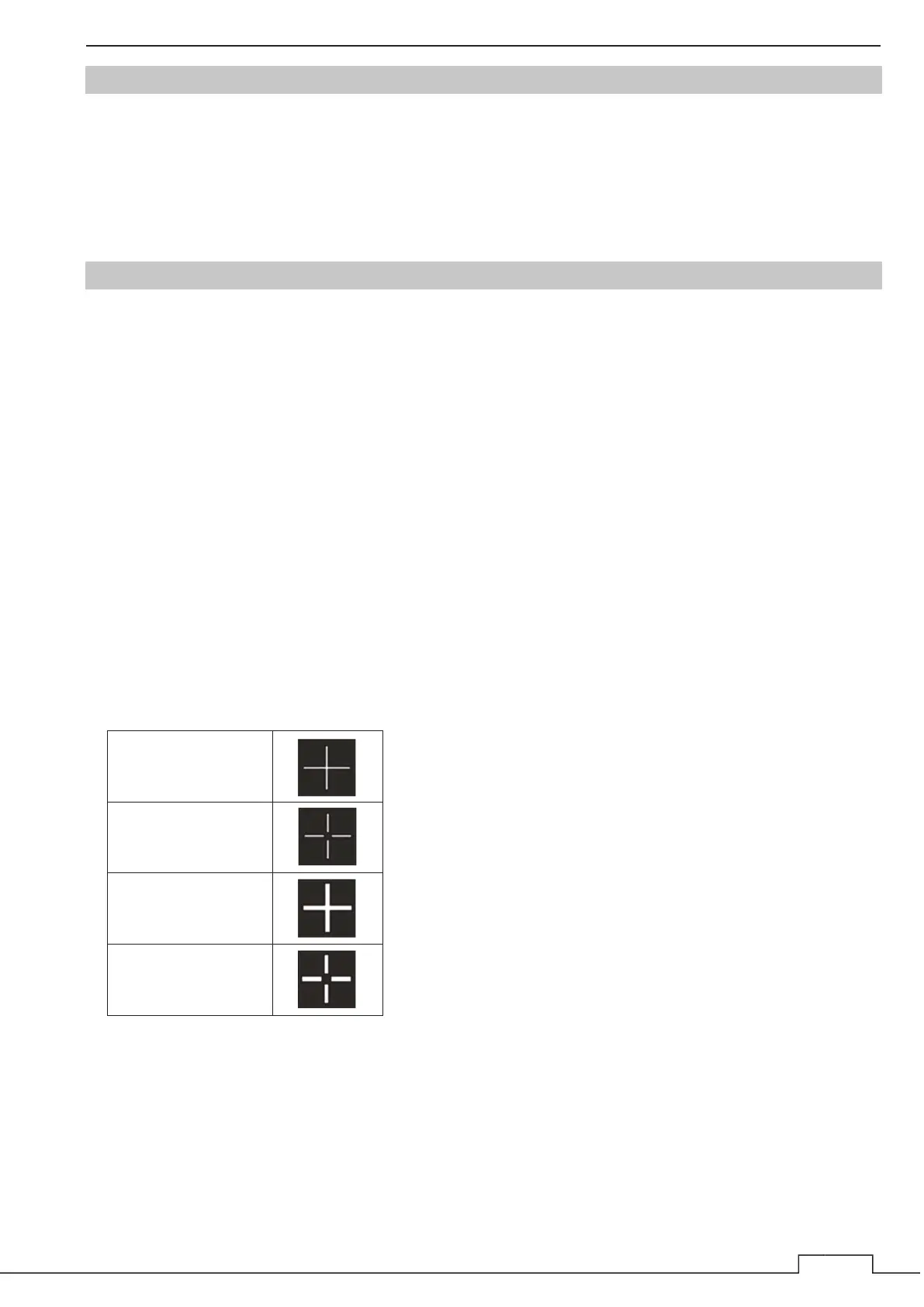
Select the type of the cursor mark on the radar display (“Pattern”).
Pattern is selected from following list.
Thin Cross
Thin Cross
(Empty of Center)
Thick Cross
Thick Cross
(Empty of Center)
Numeric display uses these settings of bearing mode and unit in this function.
For details of numeric display setting, see “8.9.3 NUMERIC DISPLAY.”
 Loading...
Loading...



