Page 7.4 - 18 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Setpoint, rotation- and ramp setting
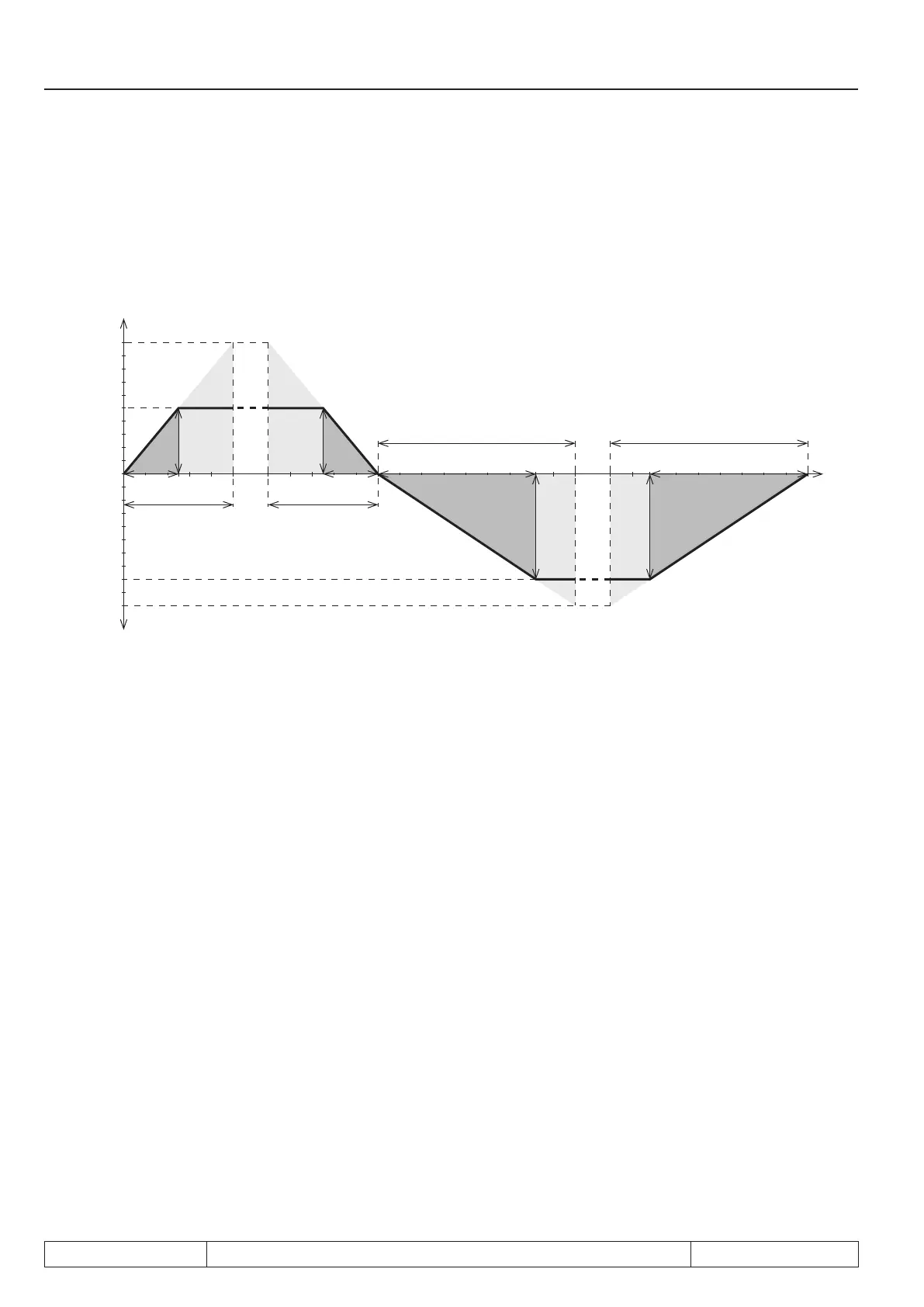
7.4.8.2.1 Linear ramps
The linear ramps are parameterized with parameters oP.28 „acc.time for.“, oP.29 „acc. time rev.“, oP.30 „dec.
time for.“and oP.31 „dec. time rev.“.
Fig. 7.4.7.2.1 Acceleration and deceleration times
1000
800
0
∆ n
1000
500
∆ t
oP.28
∆ n
∆ t
oP.30
∆ t
∆ n ∆ n
oP.29
*
1
∆ t
oP.31
*
1
+n [rpm]
-n [rpm]
Rotation direction
forward
Rotation direction
reverse
oP.28
Acceleration time forward *1
If the value "=For" is adjusted in these parameters (accelerati-
on and deceleration times for rotation direction reverse), then
the values of rotation direction forward (oP.28 and oP.30) are
valid.
oP.29
*
1
Acceleration time reverse
oP.30
*
2
Deceleration time forward
oP.31 *
1
Deceleration time reverse
∆ n
Speed change *2
If the value "=Acc" is adjusted, then the value of acceleration
forward (oP.28) is valid.
∆ t
Acceleration time for ∆n
ramp time to be adjusted (oP.28...oP.31)
–––––––––––––––––––––––––––––––––––
reference speed (dependent on ud.02)
required ramp time (∆t)
––––––––––––––––——––––
speed change (∆n)
=
Reference speed = 1000 rpm
in 4000 rpm mode
2000 rpm
in 8000 rpm mode (see chapter 5)
Example: A drive shall accelerate from 100 rpm to 1000 rpm in 5s
desired ramp time Δ t = 5 s
speed change Δ n = 900 rpm
4000 rpm mode reference speed = 1000 rpm
ramp time to be adjusted
5 s * 1000 rpm
900 rpm
oP.28 = = 5,56 s

 Loading...
Loading...

